ditto anne's post.
THANK YOU to anyone and everyone who made this possible.
we DID it, guys! :]
that said, we leave for portland wednesday and have plenty to do before then.
on top of anne's stuff we need
-a complete bill of materials
-stuff for chairmans //not until svr
-programming compilation
(wow, it's reflex to comment out stuff now. eek)
woodie flowers and chairman's are getting submitted tomorrow.
now go catch up on sleep and relax until school starts.

Wednesday, February 20, 2008
Tuesday, February 19, 2008
SHIP SHIP SHIP!!!
WE SHIPPED THE ROBOT!!! :D
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
Friday, February 15, 2008
to dooooo in the next five days
in no particular order
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
Wednesday, February 13, 2008
wednesday
hey
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
Tuesday, February 12, 2008
monday and tuesday
MONDAY
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
Saturday, February 09, 2008
saturday
today was just one of those robotics days
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
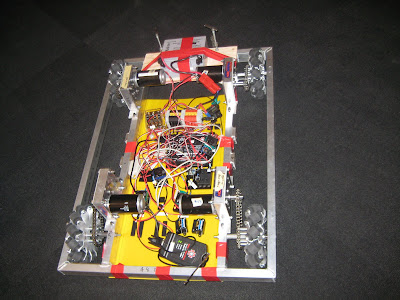
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
Friday, February 08, 2008
Wednesday, February 06, 2008
long time no blogging...
yay to anne for picking up my blogging slack!
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
Tuesday, February 05, 2008
4 gearboxes and we need a gripper... :(
YAY I'M BLOGGING!!!
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
Subscribe to:
Posts (Atom)