i would just like to offer up thanks to everyone who helped us...yay!!!
kersten? is the digging machine party on? who do i talk to about that?
BUILD_ WE ARE NOT FINISHED, THIS WEEK WE NEED TO MAKE THE BUMPERS AND GET TOGETHER WHAT WE ARE GOING TO TAKE WITH US TO PORTLAND. AND NO, WE CANT TAKE EVERYTHING. WHEN WOULD PEOPLE LIKE TO MEET THIS WEEK? PERHAPS FRIDAY OR SATURDAY? OR IF WE END UP HAVING A PARTY, THAT COULD POSSIBLY INCLUED THE MAKING OF BUMPERS, (WHICH ARE NOT THAT COMPLICATED TO MAKE)
ON THAT SAME NOTE, DOES ANYONE HAVE 6 POOL NOODLES THAT WE COULD HAVE?

Wednesday, February 22, 2006
Sunday, February 19, 2006
Under the hood

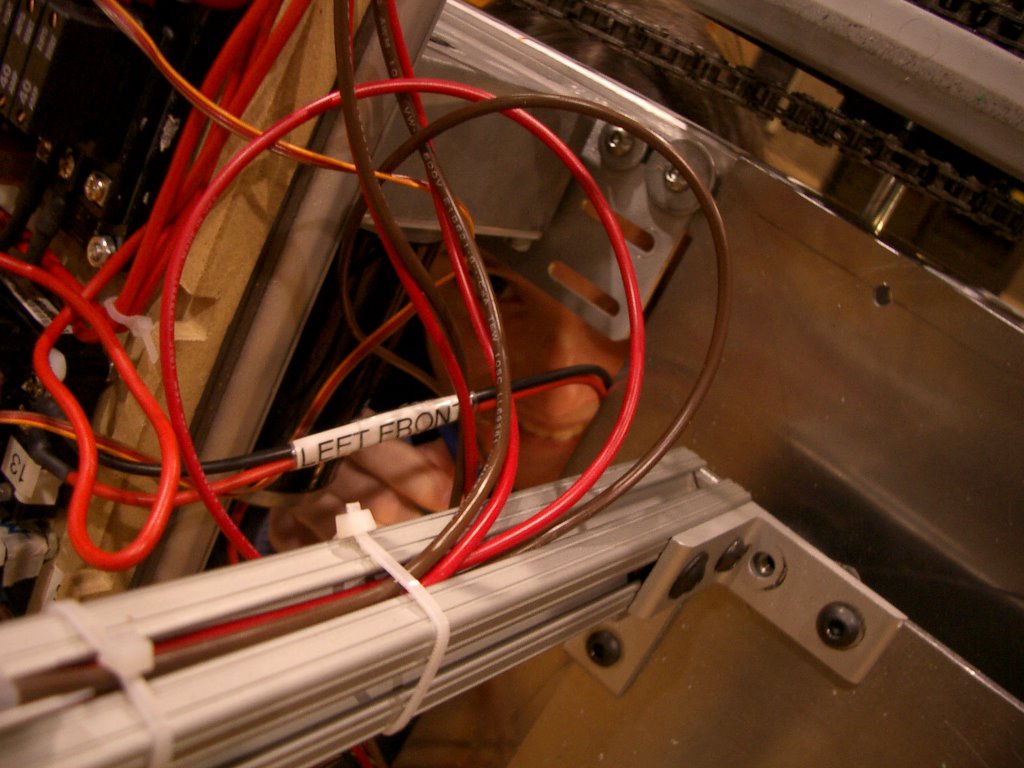
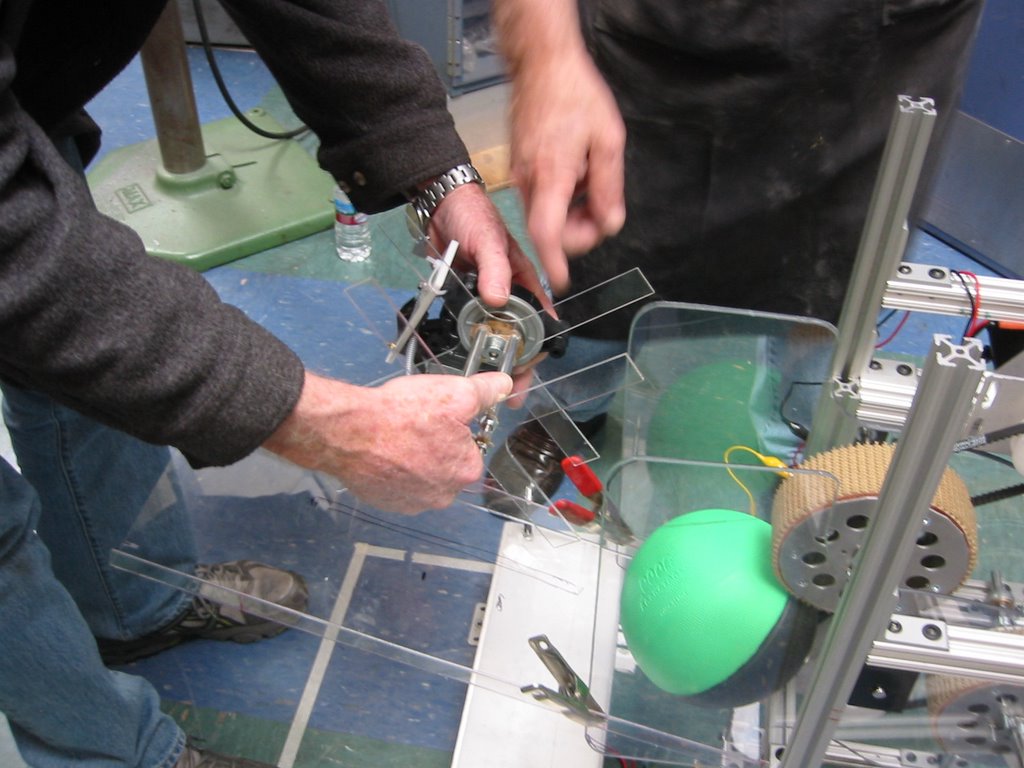
Sophia, under the hood, re-soldering the connections to the potentiometer - worth its price in gold to see. Today has been a really amazing day. We spent the better part of the morning until early evening at IDEO and a certain office van dweller named Sven helped us transport Rosie back to Castilleja.
I'm overwhelmed and amazed by the generosity of so many people - Jim Feuhrer for stepping up this week pulling through a full seven days of midnight departures to build the hopper and the ramp, rebuild the turret plate, and mount multiple sensors, George Schnurle for coming by to give moral support and good humor even though his daughter is 3000 miles away, Doug Bourn for somehow managing to find time to come by even though he is up against an even tighter and tougher deadline at Tesla Motors, Eric Macintosh for some serious coding prowress, Bud Delisle for being there for the girls, Chris Countryman for animation advice and helping me in my braindead state to implement an RC switch debounce, George Aye for coming ALL the way from Chicago to offer his rendering expertise to Shirin, Beth Schnurle, Debbie Hara, and Heidi Crone for their undying wisdom, encouragement and support, and of course, David Berger for the famous quiche that keeps me coming back for more.
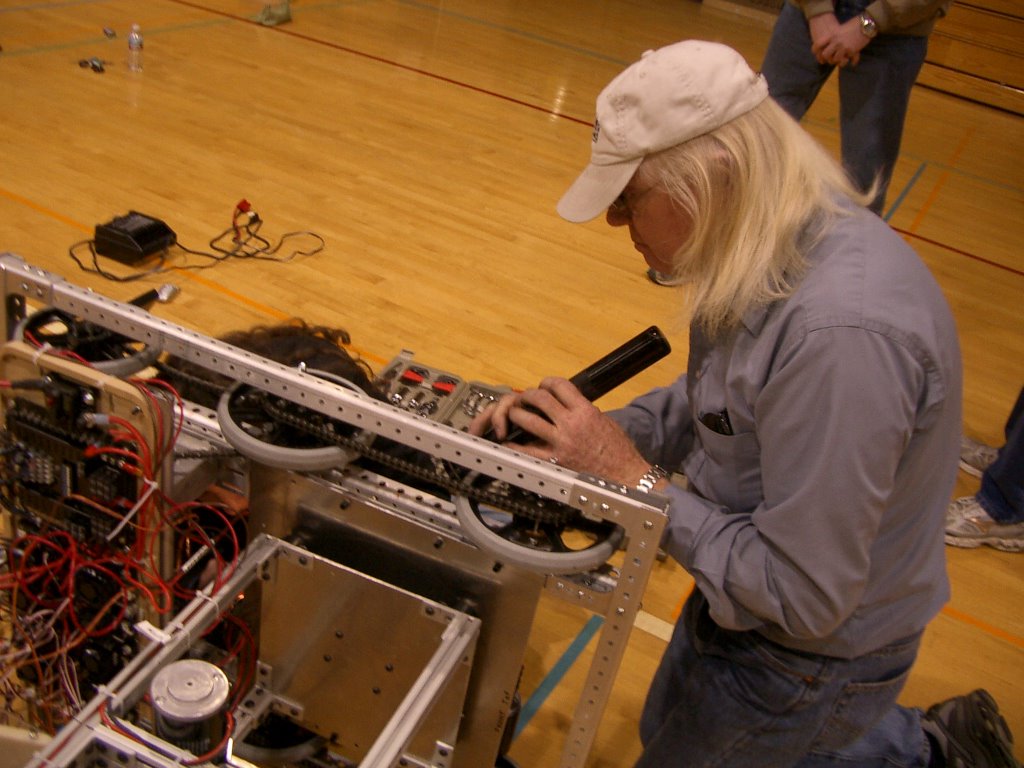
The Castilleja gymnasium is officially taken over by robotics for the next 48 hours. I think Rosie can go up against any basketball player. The kiddos brought a couch into the gym - they are all becoming serious couch potato roboticists.
This is a huge accomplishment for the team this year. We went from Thor, a robot with five motors and no sensors and no autonomous code last year to Rosie, a robot that has eight motors, three complicated sensors with interrupt code, and some sort of autonomous behavior to be yet determined. Still going with another 60 hours left. I'm really amazed that this team pulled it off. Even if Rosie is still in its infancy in terms of intelligence, she'll do some serious damage on the field . . . . ;)
Thursday, February 16, 2006
Extreme weight loss program worked! Jimmy and Bud and the gang took out all sorts of stuff - motor sprocket got taken down to half the weight, all the dead weight was removed, the transmissions were pulled out and the gears were pocketed, the 80-20 frame struts were removed (and still quite stable), the metal plate underneath the electronics box was cut down, the chain tensioners replaced by half links, chester turned into a leaner meaner metal plate . . . that's an entire 20 lbs gone!
9:30 pm Chrissy and I hooked both the launching motors and the gate motor up to a battery and successfully launched two balls in succession. Definitely a jumping up and down moment!!
One ounce at a time.
Jimmy and Bud can't help themselves. Both lathes whirring, 1 ounce at a time, they are determined to get the robot in shape. Everything that can be turned down in diameter is getting turned down . . . sprockets, gears, everthing.
20 lbs = 320 ounces. One ounce at a time.
Not my idea, but I was working on the mill and it was really a kodak moment see both Jimmy and Bud work on the lathe at the same time for the same cause. The two of them are on a crusade now.


20 lbs = 320 ounces. One ounce at a time.
Not my idea, but I was working on the mill and it was really a kodak moment see both Jimmy and Bud work on the lathe at the same time for the same cause. The two of them are on a crusade now.


Wednesday, February 15, 2006
24 hour Hollywood Diet
our robot is fat
i'm thinking south beach, or maybe slim-fast, 24 hour hollywood diet, perhaps the grapefruit or juicing diet, atkins, low-carb, low-fat, low-calorie, low sugar diet?
think light thoughts
think helium
think how we can lose 20 pounds
we'll make a fortune, "lose 20 pounds in under a week!"
for referance, 20 pounds is 2 batteries.
what could we cut holes in? what can we remove? what can we do without?
sleep on it, keep it in the back of your mind, and tomorrow we'll get something done.
i'm thinking south beach, or maybe slim-fast, 24 hour hollywood diet, perhaps the grapefruit or juicing diet, atkins, low-carb, low-fat, low-calorie, low sugar diet?
think light thoughts
think helium
think how we can lose 20 pounds
we'll make a fortune, "lose 20 pounds in under a week!"
for referance, 20 pounds is 2 batteries.
what could we cut holes in? what can we remove? what can we do without?
sleep on it, keep it in the back of your mind, and tomorrow we'll get something done.
Tuesday, February 14, 2006
IDEO 11:30 pm Valentines Day
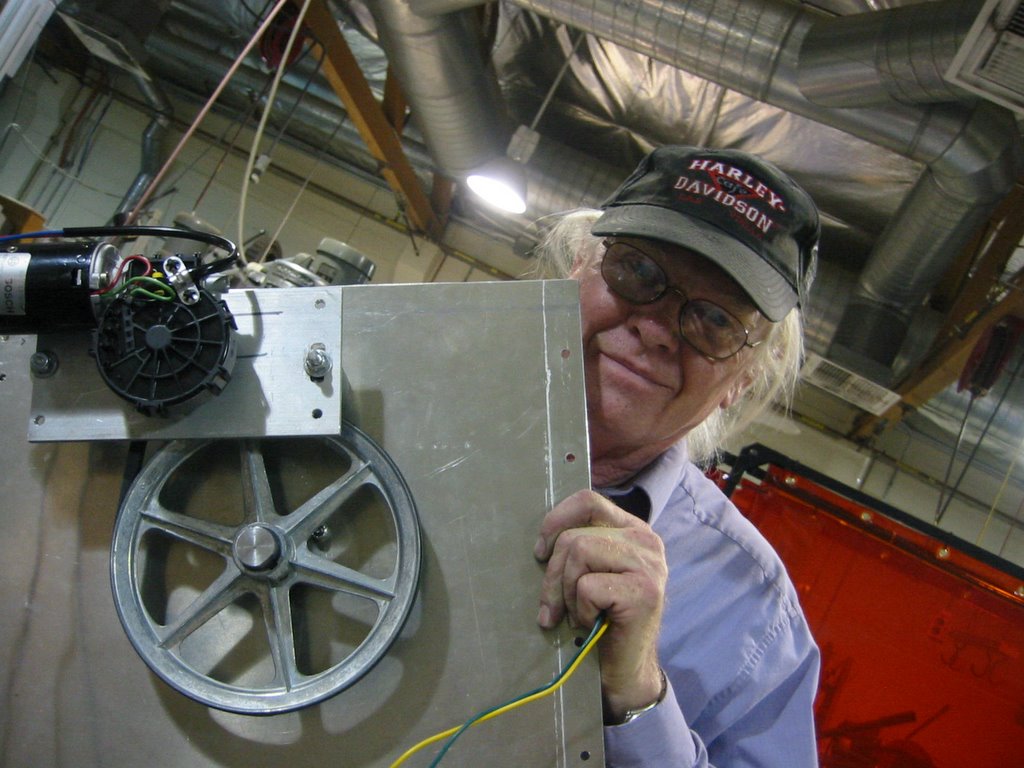
Jimmy just went home. Just wanted to post these two important photographs.
1. Jimmy, in all his kindness and generosity, couldn't put up with a direct drive motor, so after a quick mad race to find v-belt pulleys and a v-belt, we had something running by 11 pm tonight at IDEO. It is geared down by a factor of four, which means when you run the motor at maximum efficiency right now (approximately 6v), you get a really beautiful smooth motion.
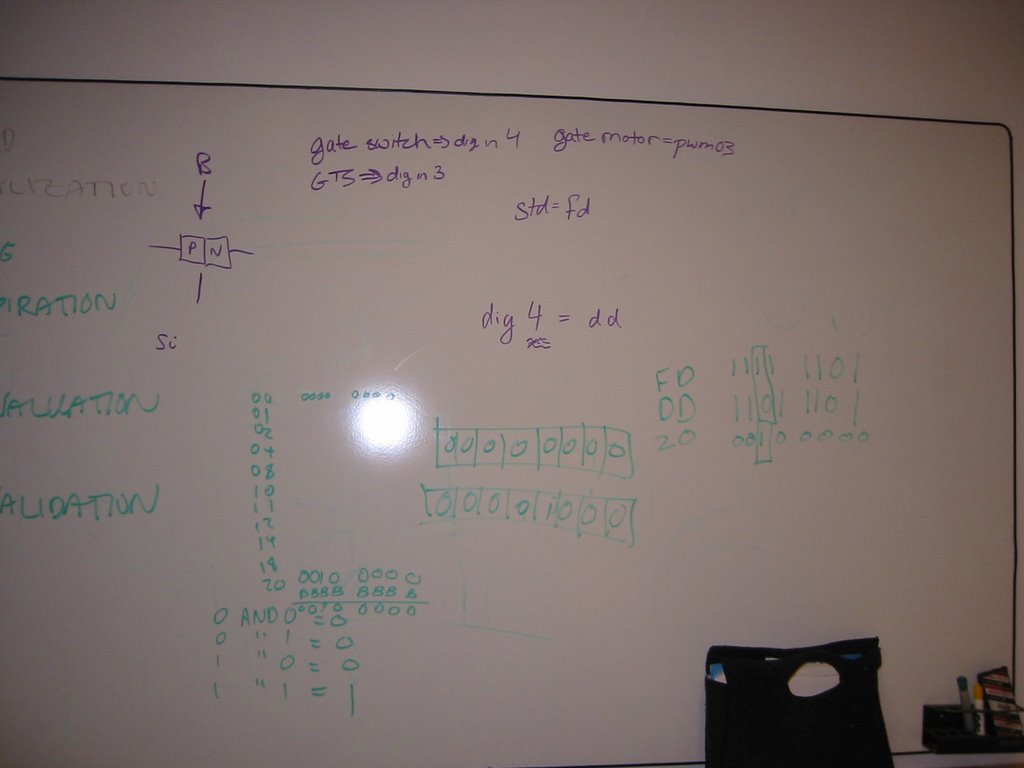
2. We had to clean up the shop. It is becoming a bit of a problem here with the amount of room we are taking up. I also erased everything off the whiteboard so I've attached a photograph for programming above, just in case you need your pinout information. Eric McIntosh and Doug have been a great help getting the indexing system working with the interrupt.
It's been a tough tough week. Remember that although you can stay up late and have fun in your teens, us old and crotchety mentors don't last too many 11 pm days in a row.
I am going home now so I can sort of do my part on my real job.
- Emily
I love you all
Regardless of how things turn out, and how robotics goes, I want to let you know, especially on this special day, that you are all fantastic individuals. It has been my privilege and honor to get to know you. Working in teams is a really really hard thing - there are multiple areas of academia that study teamwork alone. Sometimes it is really hard to work with our best friends. Sometimes our best workmates are not our best playmates. Working together requires a very different type of respect for each other than playing together. When you are on a team, like a soccer team, you want to know that when you kick the ball to someone, that they will be there for you to receive your ball. You kick the ball to people who you know will move your team towards the goal. Sometimes, your best friend isn't the best person to kick the ball to even though you can count on her to help mend your broken heart or cheer you up on a cloudy day.
To this day, I remember and regret losing a few great friendships because we didn't get along as a team on a project. It takes maturity and openmindedness to look beyond a tough and challenging experience to maintain a friendship through the trials and tribulations of team work.
In the end, even if we don't have a robot that is working, we have a friendship that we can cherish. Happy Valentines Day Gatorbotics!
To this day, I remember and regret losing a few great friendships because we didn't get along as a team on a project. It takes maturity and openmindedness to look beyond a tough and challenging experience to maintain a friendship through the trials and tribulations of team work.
In the end, even if we don't have a robot that is working, we have a friendship that we can cherish. Happy Valentines Day Gatorbotics!
A plea from programing
We need to get sensors up and runing as fast as possible. Programing has done their part: The code is mostly up and running. Unfortunately, before they can debug they need a platform to run things on. If you have any hope of autonomous, you need to get the GTS mounted. I know this is no easy task (it needs to be under 1.5-2mm from the gear, but please, don't let all the wonderful coding go to waste. Also, if you have anything else you want programmed, you need to let programing know ASAP.
Thanks!
Thanks!
HAPPY VALENTINE'S DAY!
we should kick some butt today...let's get something that fits together today...i believe in us..
Monday, February 13, 2006
Moon Monday
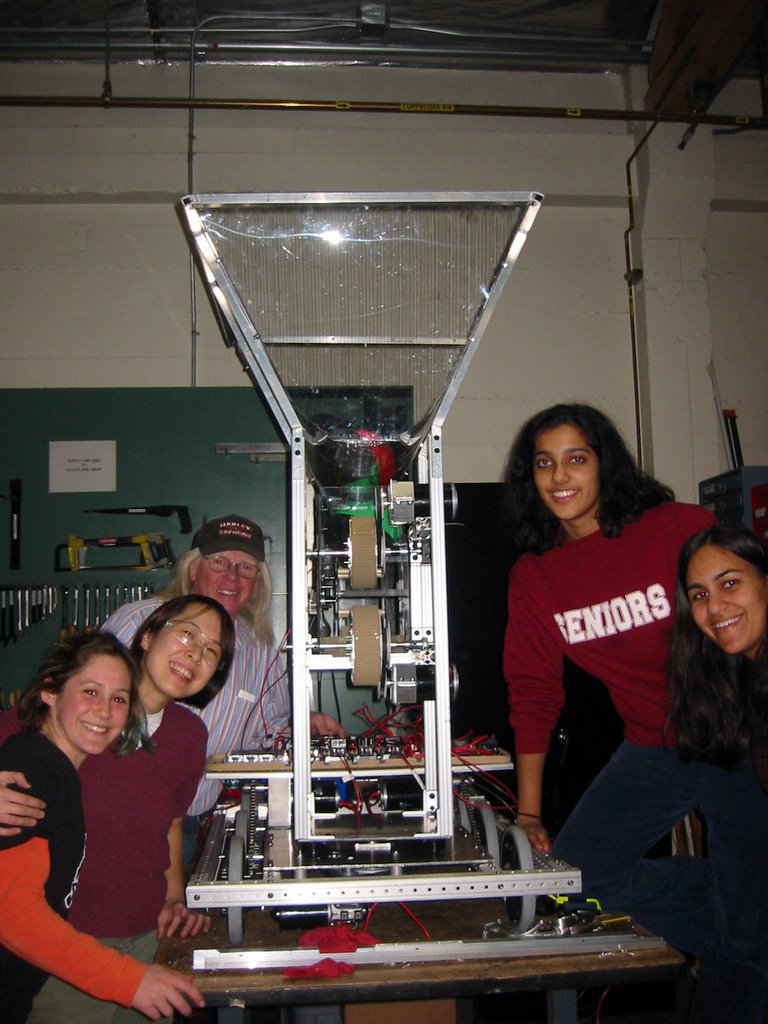
Here are some happy pictures from this evening. I posteth them before I head to homework...and then bed. Enjoy!



Yeah...there was a fourth...but I dubbed it the "Evil Glare of Julia" and chose not to post it for fear of being beheaded.
-Alecia



Yeah...there was a fourth...but I dubbed it the "Evil Glare of Julia" and chose not to post it for fear of being beheaded.
-Alecia
Sunday, February 12, 2006
Sooooper Sunday


Bud, Jimmy, Kersten, Chrissy, Beth, Heidi and I got cranking this Sunday afternoon. Jimmy, especially, came in our hour of need and helped us think out of the box - literally. I had a lot of reservations about fixing the hopper to the chassis and have the turret rotate, given that we'd have a ramp cantilevered off the turret, and then Jimmy took a look at it and asked, can't we fix the hopper to the top of the turret as well? So given that we can expand to 60" by 60" once we start, having a 28" X 38" hopper that rotates is NO PROBLEM now.
As well, Jimmy WELDED a beautiful and light 3 lb. hopper frame for us. Now its all Chrissy's and Kersten's to add mesh and polycarb sheeting to.
We also did a bunch of brainstorming on the indexing / gating device. Instead of having the ramp come in from the side, the hopper allows the balls to come in from the top now, and we can float the gating device rather than have to cut slots in the ramp. More coming tomorrow. We're getting there.
One thing that was really useful for me today was to kind of mock everything up in terms of the launching sequence. With a bunch of things clamped to the launcher, and everyone helping ou and holding something, whether it was the gating device, or the ramp, we tried loading two balls down the hopper, and hooking up the gating device temporarily so it would turn and load balls one at a time. Man, that really helped solidify things for me.
Kudos to Chrissy and Kersten for the good work today prototyping the hopper with the mesh stuff. Lots of good prototyping and learning going on today that made it really fun!!!
TOMORROW. 5:30 pm. IDEO. BRING CHASSIS AS WELL.
Bud and I are both worried that with all the stuff on top of it, the launcher is going to bounce itself off the chassis and run away!!! See you later!!
The movie thing
Hey, guys!
So I think you guys told me what was going on in the movie and I couldn't remember if there was any Gracious Professionalism in it. I think including GP would be good if you can. Probably we don't want to buy gracious proffessionalism in the hardware store, cuz then it doesn't seem like we had it last year, but maybe if we buy a GP, like, refill or something? Or have a vat of it in the van that you can see from outside? I dunno. And if you already have it worked in somehow, that's awesome and you can ignore this.
Cheers!
Kersten
So I think you guys told me what was going on in the movie and I couldn't remember if there was any Gracious Professionalism in it. I think including GP would be good if you can. Probably we don't want to buy gracious proffessionalism in the hardware store, cuz then it doesn't seem like we had it last year, but maybe if we buy a GP, like, refill or something? Or have a vat of it in the van that you can see from outside? I dunno. And if you already have it worked in somehow, that's awesome and you can ignore this.
Cheers!
Kersten
SUNDAY 1:20 at IDEO SHOP
definitly coming in tomorrow ( AT THE IDEO SHOP) at 1:30...we have
demsions for where the ramp needs to go, along with angle and where it's going to be mounted. Bud made us sweet guides taht attach to the motor shaft so the thing stays square as a plus. aslo it isn't vibrating as much, so good. kersten had a good idea to mount t pieces of something as a ramp, so the ball would have to travel down the predetermined lane. we still need to decide where the window motor is going to be mounted. my mother and i got started watching the olympics and suddenly it's late, so we wont be prototying tonight...sorry :( but we got this KICK ASS netting stuff at home depot. it's for putting over plants and such so birds/dear don't eat them. it's really STRONG and WAY LIGHTER than the shower curtain...i'm also thinking it will be easier to mount (zip ties) and we got a roll 7' by 100' for $15, so i think that's a pretty good deal... :) it also looks WAY easier to mount. think seran wrap over a plate(i know it's spelled wrong and i dont care) we can take one sheet and lay it crosswise over another one, and then just cut a hole in the bottom. let's get to it!!!!!!!! we can finish this thing tomorrow...
demsions for where the ramp needs to go, along with angle and where it's going to be mounted. Bud made us sweet guides taht attach to the motor shaft so the thing stays square as a plus. aslo it isn't vibrating as much, so good. kersten had a good idea to mount t pieces of something as a ramp, so the ball would have to travel down the predetermined lane. we still need to decide where the window motor is going to be mounted. my mother and i got started watching the olympics and suddenly it's late, so we wont be prototying tonight...sorry :( but we got this KICK ASS netting stuff at home depot. it's for putting over plants and such so birds/dear don't eat them. it's really STRONG and WAY LIGHTER than the shower curtain...i'm also thinking it will be easier to mount (zip ties) and we got a roll 7' by 100' for $15, so i think that's a pretty good deal... :) it also looks WAY easier to mount. think seran wrap over a plate(i know it's spelled wrong and i dont care) we can take one sheet and lay it crosswise over another one, and then just cut a hole in the bottom. let's get to it!!!!!!!! we can finish this thing tomorrow...
Saturday, February 11, 2006
We created . . . a Mmmmonster!!
Named CHESTER!!
It also shoots like, um, a little to far now. Like across the field and 20 ft high, so we'll need to reduce / adjust the speed in software. I'm scared of this thing. I definitely don't want to be standing in front of it. We were hitting windows on on the second story in the IDEO alley way. We almost accidentally launched the ball onto the roof of the shop as well. Very scary.
Some issues we are dealing with:
- Structure seems to want to vibrate itself apart when the launcher is running (scary!!)
- No guides on the side, so sometimes the ball gets randomly sucked in sideways, resulting in shooting off to one corner. We definitely need to work on repeatability and accuracy a little bit more.
- Ramp? How are we going to secure the gate? So many things!!
Someone update me!!! What did Bud and you guys do after Kersten and I left for the rest of the afternoon?
Em
Backbot clarification
Kersten asked about this earlier, so I just want to clarify. The "Backbot" is from the defending alliance. During the middle two periods, there are three offensive robots and two defensive robots. Thus, advantage goes to offense. Note the fact that this means that the defense cannot be guarding both low goals and messing with the shooter.
Quick Updates: Progress
So we haven't checked in here for a while, but we're definitely making progress. A little scary with so many days left, but we're making our way there.
OVERALL WEIGHT:
Not to overly worry about it yet, but we're definitely getting to the heavy side. We're sitting at 100 lbs - the chassis at 70 lbs and the turret frame structure at 33 lbs. This means we need to get EVERYTHING else in under 20 lb. Not impossible but definitely a little disconcerting.
TURRET:
Build team mounted the frame to the turret base with the casters on it. Looks pretty good. It's kind of cute actually, like a little deadly R2D2. How is programming doing with limiting the range - alas, I am worried about programming. Setting up the code and sensors to do this kind of thing doesn't just come together like in a day . . . and it needs to be fault proof or else our electronics board is getting it because that van door motor will stop at nothing!!
LAUNCHER:
Okay, we're at 33lbs. One way to get rid of the weight is to remove the entire yellow base all together. Seriously, because you have the square at the bottom holding your frame together, why not just bolt your casters to that and modify the motor shaft adapter to be a lot lighter?
We have all the parts needed for a 1:1 gear ratio now for the launcher. Both are 2.75" diameter pulleys. I also have a huge assortment of timing belts now just in case we run into some issues getting everything in the frame.
HOPPER:
With Chrissy and Kersten on it, we should be done in no time. Like finish TODAY. This is SATURDAY.
GATE AND RAMP:
Needs work. Sophia, Erin and I did a little b-storming and put together a little prototype. Now we need to figure out how to mount the motor to the ramp and how to stabilitze the structure of the ramp itself. Crazy stuff. Perhaps that 'flag post' we'll have at the back of the robot will be good to mount the ramp to.
OTHER STUFF: Is anyone thinking about this stuff?
- electronics cover
- PVC flag post (to display your alliance color)
- All your signage
- All your bumpers
Okay, signing out,
Em
OVERALL WEIGHT:
Not to overly worry about it yet, but we're definitely getting to the heavy side. We're sitting at 100 lbs - the chassis at 70 lbs and the turret frame structure at 33 lbs. This means we need to get EVERYTHING else in under 20 lb. Not impossible but definitely a little disconcerting.
TURRET:
Build team mounted the frame to the turret base with the casters on it. Looks pretty good. It's kind of cute actually, like a little deadly R2D2. How is programming doing with limiting the range - alas, I am worried about programming. Setting up the code and sensors to do this kind of thing doesn't just come together like in a day . . . and it needs to be fault proof or else our electronics board is getting it because that van door motor will stop at nothing!!
LAUNCHER:
Okay, we're at 33lbs. One way to get rid of the weight is to remove the entire yellow base all together. Seriously, because you have the square at the bottom holding your frame together, why not just bolt your casters to that and modify the motor shaft adapter to be a lot lighter?
We have all the parts needed for a 1:1 gear ratio now for the launcher. Both are 2.75" diameter pulleys. I also have a huge assortment of timing belts now just in case we run into some issues getting everything in the frame.
HOPPER:
With Chrissy and Kersten on it, we should be done in no time. Like finish TODAY. This is SATURDAY.
GATE AND RAMP:
Needs work. Sophia, Erin and I did a little b-storming and put together a little prototype. Now we need to figure out how to mount the motor to the ramp and how to stabilitze the structure of the ramp itself. Crazy stuff. Perhaps that 'flag post' we'll have at the back of the robot will be good to mount the ramp to.
OTHER STUFF: Is anyone thinking about this stuff?
- electronics cover
- PVC flag post (to display your alliance color)
- All your signage
- All your bumpers
Okay, signing out,
Em
Friday, February 10, 2006
Wednesday, February 08, 2006
Warm thanks to Kersten, Beth and George

What a wonderful surprise at 9 am.
Bud, myself and the entire IDEO shop thank you dearly ;)
Tuesday, February 07, 2006
Things are not as easy as they seem
We're coming along, but it's hard with 13 days left to discover that there are a lot of little things that need to be though through. For me, time is the biggest priority right now - and that is why I am advising you with that in mind, going for concepts that are easier to successfully implement in the time that we have left, rather than trying out fancy things. If this does not jive with you, please let me know. Your priorities are the most important and all I can do is give you my best advice and support based on my experiences, and you can take it or leave it.
What's left to do? A lot of stuff!
LAUNCHER:
Kersten and Julia did some mulling over getting the 45 degree angle on the launcher and came up with a great idea of having the wheels not be right on top of each other. Fantastic! Unfortunately, we came up a little short - literally today. The frame being smaller, Emily will need to order new shorter timing belt pulleys on Wednesday for Thursday delivery. Yes, it will be another two days before you can get the launcher finished because once again, lest I remind you that parts require time to get shipped.
TURRET:
Aditi and Kersten put together a good plan for Bud to work on tomorrow, if he is free to do so. The plan was almost complete, and we talked about how a simple drawing with the hole patterns required to mount the frame as well as the casters would be useful since BUD is going to put the part on the CNC machine anyhow. I am going to stock the science project well from now on with graph paper. See my drawing below - you don't need CAD to covey to BUD or myself what you need done in the IDEO shop. (Kudos to Julia, who has already done this yesterday!)
GATE FOR BALLS:
Sophia, as much as I love your home made electromagnet, and as much as I appreciate you sharing those ideas with me, I have to admit your suggestion actually stressed me out a little bit. If this is your priority, please let us know and we'll focus on building an electromagnet, but I cannot ensure that we'll have something working for the gate by the end of this project. Again, I highly suggest choosing either the globe or denso motors, and just putting on a flag. Things take a LOT of time to calibrate. The build team hasn't really gotten to a point where they can understand how to structurally mount this motor so we're really waiting for them to reach that point as soon as possible.
BALL HOPPER / CATCHER:
Definitely needs some thinking. What is the plan here and how can we at IDEO help you out?
IN GENERAL:
With 13 days left, my realistic opinion is that we'll have a chassis that we can drive around and a turret that we can turn. The launcher, the ball hopper and the gate all still need to be integrated and I am not confident that this will happen in the time frame that we have.
At the core of this experience, it is my true pleasure to work with you, but I cannot help but to express my disappointment right now. You all had such high hopes at the beginning of the season and even with my hesitation, you managed to convince me that this was a path (shooting through the center goal. and getting the vision camera working) that we should take! This is no easy feat as I am not easily convinced. I am disappointed because of how things have come along, that we really aren't going to get to any of the autonomous stuff, nor the vision camera. That is fine, but I really wish you had told me not to spend the many hours I did already to understand the camera code, when we weren't going to really have a chance to use it at all. It's really frustrating being part of the programming team and not have anything to program or code when the hardware and the mechanical stuff isn't sorted out or even clearly conveyed to us. I will continue trying to be optimistic, but I am quickly running out of happy pills :(
A well planned engineering project and experience doesn't need to be like this. We don't need to stay up all night figuring things out. We don't need to work until the very last minute. Frankly, it would possibly be more useful to finish early and have the drivers get lots of practice with the robot. The truth is, as much as the rush of staying up all night in the very few last days, and as cool as we all think it might be, I don't think it's all that cool anymore. I wish we could work more efficiently and have clarity in what we do. Dang it, I want my 7 hours of sleep a night at my ripe old age of 24. I can't keep up with you anymore ;(
Monday, February 06, 2006
it's.....AAALLLLIIIIIVVVVVEEEEEEEE!
it moves around on the floor
got kick-ass prototype from em at ideo today
tapped holes, took stuff apart, put stuff together
(can you tell that i'm tired? :)
tomorrow
aditi and i are getting to the project room at 3 to start working on either the base of the turret or the launcher, wherever our creative genius takes us. when you show up, we will assign you to either the launcher (which shouldnt be that hard to put together) or the turret.
GOALS
finish launcher by TOMORROW(this should be easy, guys. we have all the parts, we have all the specs, we just need to assemble)
finish turret by FRIDAY because programming needs to start coding. this is important if we want an autonomous code.
ok, that is it. tired.
nighty night!
got kick-ass prototype from em at ideo today
tapped holes, took stuff apart, put stuff together
(can you tell that i'm tired? :)
tomorrow
aditi and i are getting to the project room at 3 to start working on either the base of the turret or the launcher, wherever our creative genius takes us. when you show up, we will assign you to either the launcher (which shouldnt be that hard to put together) or the turret.
GOALS
finish launcher by TOMORROW(this should be easy, guys. we have all the parts, we have all the specs, we just need to assemble)
finish turret by FRIDAY because programming needs to start coding. this is important if we want an autonomous code.
ok, that is it. tired.
nighty night!
Playing hookie at IDEO
 Around 11 am on Friday morning, Bud, Jimmy and I received a large box from Mcmaster and sort of stopped working all together on our real work. Kersten, Julia and Kersten's mom came to join us in the shop around 5 pm and we played around with different wheels, different amounts of squish, and vertical vs. horizontal
Around 11 am on Friday morning, Bud, Jimmy and I received a large box from Mcmaster and sort of stopped working all together on our real work. Kersten, Julia and Kersten's mom came to join us in the shop around 5 pm and we played around with different wheels, different amounts of squish, and vertical vs. horizontalAnyhow, this is what came out of it. I'll post more on the process, and include a BOM (bill of materials) as well on how we put this together.
Check out the video: http://www.zippyvideos.com/4610912043602206/mvi_0653
Friday
[So weird - Kersten wrote this on Saturday morning, but it got erased :( . . . I copy and pasted her original post off of Google's cache]
OK, so I guess we kindof didn't meet on Friday, but Em invited the non-FOMF working people (aka me and julia) to ideo to play with this awesome little wheel prototype thing. I'm thinking we should try to get two wheels, because it works well, both vertically and horizontally. We can talk about it later once everyone has seen the prototype.Have fun FOMFing!And be sure to come to the SJ library, because that's the happenin' spot, you know.Kersten
posted by Kersten Schnurle at 8:06 AM
OK, so I guess we kindof didn't meet on Friday, but Em invited the non-FOMF working people (aka me and julia) to ideo to play with this awesome little wheel prototype thing. I'm thinking we should try to get two wheels, because it works well, both vertically and horizontally. We can talk about it later once everyone has seen the prototype.Have fun FOMFing!And be sure to come to the SJ library, because that's the happenin' spot, you know.Kersten
posted by Kersten Schnurle at 8:06 AM
Thursday, February 02, 2006
BAD-ASS
Ok so WE OFFICIALLY HAVE A ROBOT THAT RUNS! YAY!!!
so even if we cant do anything else, we can ram people. :)
but seriously, we got a lot done today.
CHAIN- Bud make us come kick-ass chain tensioners...when i first saw them i was kinda skeptical, but they work really well and get 500 points for visual appeal. yay! our back chain is tensioned!
for the front ones, we're going to go by last year's approch, bunny ears. since chain loosens up over time, if it does loosen up enoungh, we can always take the bunny off and put a bolt to tension it up more. good stuff.
BATTERY MOUNT- is almost finished. we just need to electrical tape-it so it doesn't conduct through the chassis (yikes) Props for good design by alecia! so now we can drive the robot around without strapping the battery to the side of the chassis with duct tape. haha.
LAUNCHER- built more of the platform and motor-securing device. it's almost finished so yay!
THINGS TO DO.
-mount bottom turret plate
-drilling holes to attach to chassis
- motor? directly to the plate (we already have a shaft hole and mounting screw holes. or we can put it elsewhere . sophia had a good idea. so direct drive the turret (van door hooked up to the plate) and in the middle put 2 gears, one on the shaft that is turning, and one on a potentiometer. they would have to be the same size gear...it sounds good to me...what do you thing emily?
-mount round turret plate.
-do we have the ball bearings? b/c we should attach them. we should also get another piece of aluminum to attach them to. get shaft and motor hooked up to the right place to fit
-ball feeder/storage
-posts need to go up. need to get materials for posts. EM- is there 80-20 that is 1/2" x 1/2" instead of 1 squared? that would be helpful.
-shower curtain, taught
-feeder to wheel (connection between storage and wheel. the prototype that Bud made us with the mousetrap maybe?
-MESH SIDES
-BUMPERS
-build and mount. specs are somewhere on the first site
-PVC pipe
-needs to start at 3ft and go up to 4ft, capped at the bottom
-NAME!!
ok so that's a lot to do. builders- no meeting this saturday (go to FOMF)but put your thinking caps on and get ready to rumble. these next two weeks are going to be killer.
and stress=dont do it. just say no. in the words of sophia through emily to me, we could build a robot that just moves in about 2 days, but what would we learn from that? or something like that.
so even if we cant do anything else, we can ram people. :)
but seriously, we got a lot done today.
CHAIN- Bud make us come kick-ass chain tensioners...when i first saw them i was kinda skeptical, but they work really well and get 500 points for visual appeal. yay! our back chain is tensioned!
for the front ones, we're going to go by last year's approch, bunny ears. since chain loosens up over time, if it does loosen up enoungh, we can always take the bunny off and put a bolt to tension it up more. good stuff.
BATTERY MOUNT- is almost finished. we just need to electrical tape-it so it doesn't conduct through the chassis (yikes) Props for good design by alecia! so now we can drive the robot around without strapping the battery to the side of the chassis with duct tape. haha.
LAUNCHER- built more of the platform and motor-securing device. it's almost finished so yay!
THINGS TO DO.
-mount bottom turret plate
-drilling holes to attach to chassis
- motor? directly to the plate (we already have a shaft hole and mounting screw holes. or we can put it elsewhere . sophia had a good idea. so direct drive the turret (van door hooked up to the plate) and in the middle put 2 gears, one on the shaft that is turning, and one on a potentiometer. they would have to be the same size gear...it sounds good to me...what do you thing emily?
-mount round turret plate.
-do we have the ball bearings? b/c we should attach them. we should also get another piece of aluminum to attach them to. get shaft and motor hooked up to the right place to fit
-ball feeder/storage
-posts need to go up. need to get materials for posts. EM- is there 80-20 that is 1/2" x 1/2" instead of 1 squared? that would be helpful.
-shower curtain, taught
-feeder to wheel (connection between storage and wheel. the prototype that Bud made us with the mousetrap maybe?
-MESH SIDES
-BUMPERS
-build and mount. specs are somewhere on the first site
-PVC pipe
-needs to start at 3ft and go up to 4ft, capped at the bottom
-NAME!!
ok so that's a lot to do. builders- no meeting this saturday (go to FOMF)but put your thinking caps on and get ready to rumble. these next two weeks are going to be killer.
and stress=dont do it. just say no. in the words of sophia through emily to me, we could build a robot that just moves in about 2 days, but what would we learn from that? or something like that.

Kilroy's Greatest Hits

Memoirs of today.
Disclaimer: some pics may be blurry because my camera's longer shutter options were somehow on at first.

Robot Name Link
Hey team. Here's an interesting link I found today. I don't think it helps us with choosing a robot name really, but I thought you'll get a good laugh at least:
http://cyborg.namedecoder.com/
Sara
http://cyborg.namedecoder.com/
Sara
Wednesday, February 01, 2006
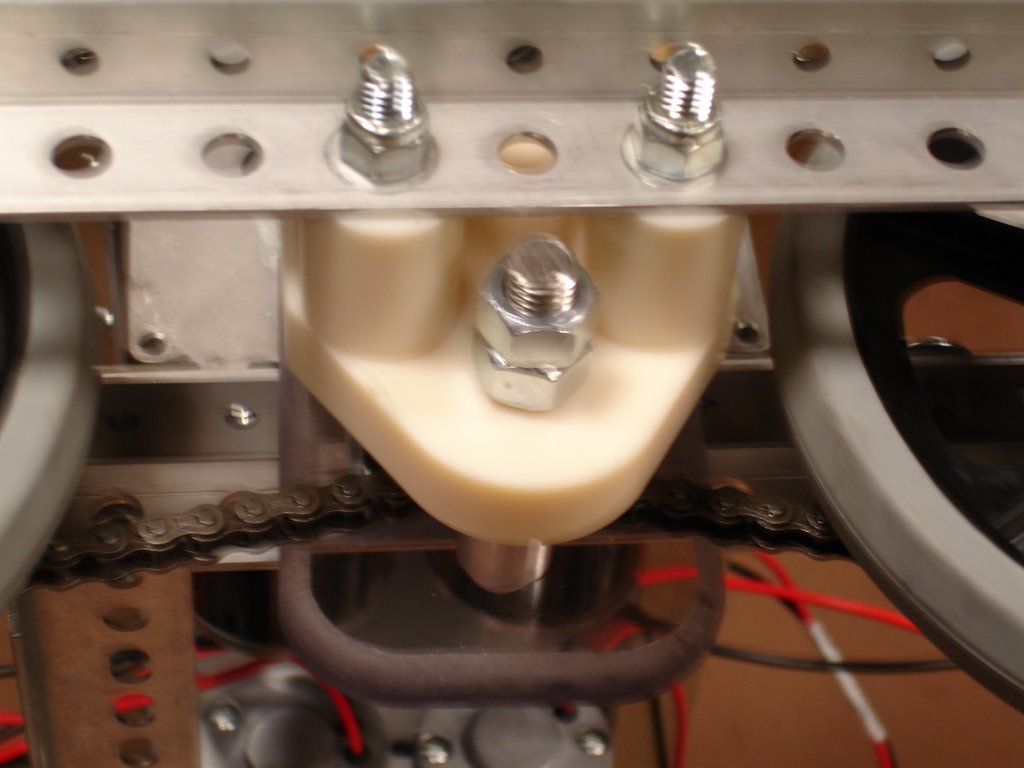
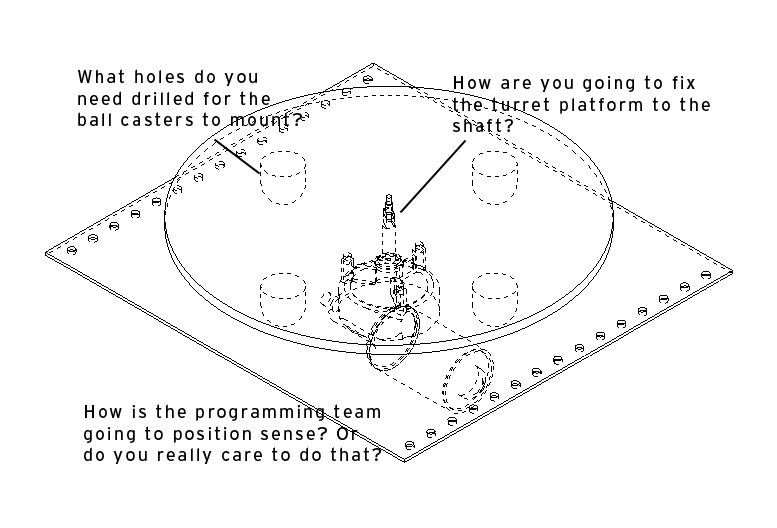
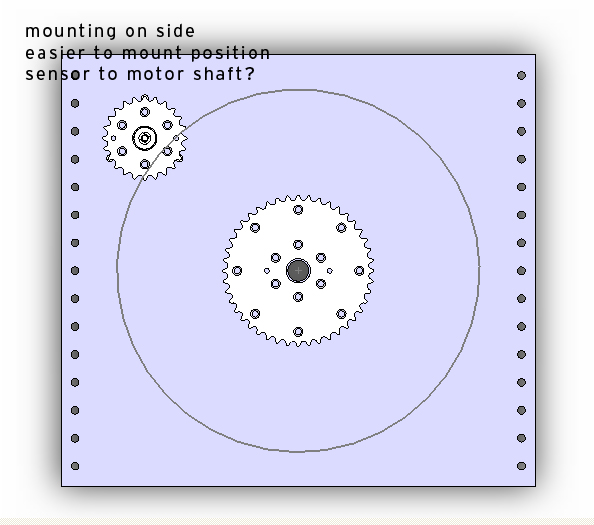
A few turret questions
All in the pictures.
The biggest one that sort of concerns me (and please chime in Chris) is whether we should drive the turret directly or if we should drive it using a sprocket / chain setup. The reason why this decision isn't clear to me is because it AFFECTS PROGRAMMING. Chris, what is our plan to position sense, if any, if the the motor directly drives the turret? Or maybe we should let go of trying to do autonomous shooting and camera tracking all together?


The biggest one that sort of concerns me (and please chime in Chris) is whether we should drive the turret directly or if we should drive it using a sprocket / chain setup. The reason why this decision isn't clear to me is because it AFFECTS PROGRAMMING. Chris, what is our plan to position sense, if any, if the the motor directly drives the turret? Or maybe we should let go of trying to do autonomous shooting and camera tracking all together?

tapped holes in 80-20 so we don't have to use "L" brackets. yay!
took apart arm from last yaer, kersten designed an awesome motor mount thing so it doesn't move around.
jen and chirs and Jimmy took the aluminum plate over to ideo and drilled out a hole for the shaft. they are also drilling out holes for the side so we can attach it to the chassis.
in terms of the stainless steel plate, we cut one and a 1/2 of the sies, before the blade went out...boo-hiss.
so we still need a piece of aluminum for the turret, around 1/8 of an inch.
ok the computer just went dark so i cant really see anything, so ciao for now.
took apart arm from last yaer, kersten designed an awesome motor mount thing so it doesn't move around.
jen and chirs and Jimmy took the aluminum plate over to ideo and drilled out a hole for the shaft. they are also drilling out holes for the side so we can attach it to the chassis.
in terms of the stainless steel plate, we cut one and a 1/2 of the sies, before the blade went out...boo-hiss.
so we still need a piece of aluminum for the turret, around 1/8 of an inch.
ok the computer just went dark so i cant really see anything, so ciao for now.
Perspective
 By Saturday, FEBRUARY 5TH last year, with 17 days left, we had a completely functional arm. (How do I know, I took the photo to the left on that day, and it's marked with the date.
By Saturday, FEBRUARY 5TH last year, with 17 days left, we had a completely functional arm. (How do I know, I took the photo to the left on that day, and it's marked with the date.By THURSDAY, FEBRUARY 10TH (2005), we had a completely functional robot with 12 days left.
We will not be there this year. I am optimistic that we can possibly potential have something sort of all integrated by zero days left, but even with that I am not sure.
But that's one person's opinion,
Emily
Subscribe to:
Posts (Atom)