
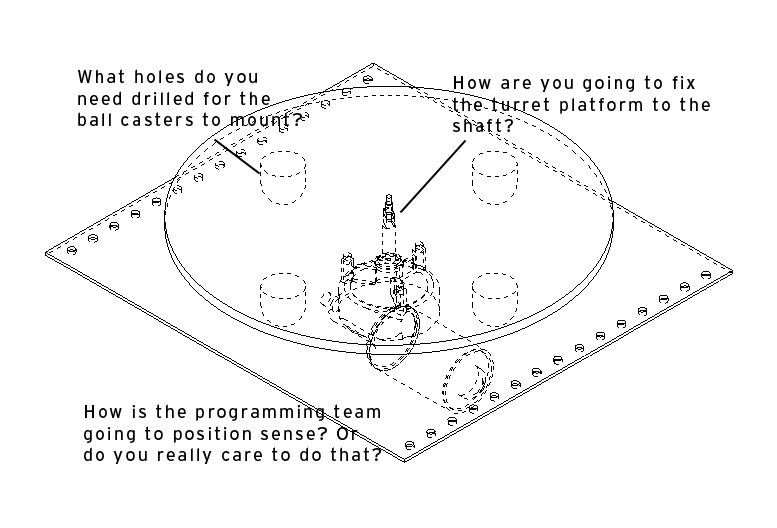
The biggest one that sort of concerns me (and please chime in Chris) is whether we should drive the turret directly or if we should drive it using a sprocket / chain setup. The reason why this decision isn't clear to me is because it AFFECTS PROGRAMMING. Chris, what is our plan to position sense, if any, if the the motor directly drives the turret? Or maybe we should let go of trying to do autonomous shooting and camera tracking all together?

2 comments:
Hey, Em!
How does the motion sensor work, and why would it be easier to mount it with the motor on the side?
Kersten
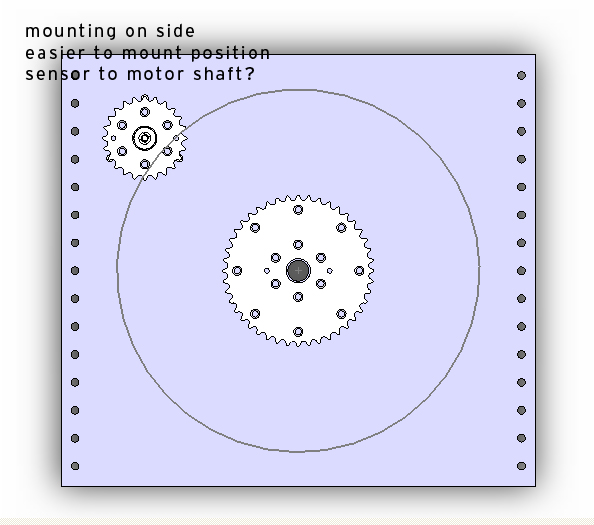
Good morning Kersten. Yes, it might be worthwhile to chat with programming. They figured out how to use a potentiometer (something that changes resistance as you turn the nob) so they're thinking of mounting the potentiometer right on top of the motor shaft, but fix the potentiometer to the chassis base somehow. With the motor on the side, you can actually mount something above the motor shaft . . . if it's hiding underneath the turret, I'm not sure how we can nudge a sensor in there.
Yes yes, this is precisely the stuff I'm struggling with because we don't have a clear plan!
Post a Comment