-prototyping
-screw mecanum wheels (Twice...)
-prototype for arm
-velcroed protective polycarb on board/chassis
-soldering
-organing the project room/familiarizing with parts
-soldering
-taking apart scotty
-wiring electronics board
-drilling holes into the chassis for bumpers
-painting/repainting the bumpers
-going on random errands
-watching jim cut/weld things
-soldering limit switch
-taking apart scotty
-writing electronics board
-observing
-discussion/making group design decisions
-cleaning project room
there are some obvious trends here.
ginna has volunteered to be in charge of next year's new team members! yay! that's awesome.
we also talked about other things new team members can do and the importance of being willing to simply watch and observe - that's how you learn!

Thursday, March 06, 2008
between rounds checklist 06
most of these aren't actually relevant, but i do want to make a more complete list...
Things to do between rounds:
-Check electronics board:
-make sure speed controllers are on tight
-make sure board is firmly attached to aluminum plate which should be firmly attached to transmissions
-Make sure PWMs (LED, pinwheel esp) are plugged in
-replace chain tensioners
-check bumpers:
-need patches?
-still on the robot?-
Check turret set screws
-tighten shaft collars on chassis wheel axles
-tighten shaft collars on wheel o' doom axles-check chassis wheel axles (still straight?)
-replace batteries:
-check voltages
-zip tie 12V
-check wires on turret (not tangled, in chains)
-check PWM jumper for autonomous
Things to do between rounds:
-Check electronics board:
-make sure speed controllers are on tight
-make sure board is firmly attached to aluminum plate which should be firmly attached to transmissions
-Make sure PWMs (LED, pinwheel esp) are plugged in
-replace chain tensioners
-check bumpers:
-need patches?
-still on the robot?-
Check turret set screws
-tighten shaft collars on chassis wheel axles
-tighten shaft collars on wheel o' doom axles-check chassis wheel axles (still straight?)
-replace batteries:
-check voltages
-zip tie 12V
-check wires on turret (not tangled, in chains)
-check PWM jumper for autonomous
one last thing:
code documentation is getting there (we have A LOT of code this year, actually. not in terms of complexity, but length. i think i'm at 63 pages? those case statements take up a lot of room.)
who wants to bind it for us?
how many copies should we make? one for karlin, one for emily, at least 2 for us, ? for judges...
chairman's presentation - is everyone familiar with "our story"? what is "our story"?
box of prototypes
any changes we want to make to the spiffy poster
outreeeeeach pictures
etc
code documentation is getting there (we have A LOT of code this year, actually. not in terms of complexity, but length. i think i'm at 63 pages? those case statements take up a lot of room.)
who wants to bind it for us?
how many copies should we make? one for karlin, one for emily, at least 2 for us, ? for judges...
chairman's presentation - is everyone familiar with "our story"? what is "our story"?
box of prototypes
any changes we want to make to the spiffy poster
outreeeeeach pictures
etc
Wednesday, March 05, 2008
from anne's comment
just in case people didn't get to anne's comment.
after only a day, some of this is obsolete, but that's okay :)
we're also potentially changing the gear ratio for the arm from 4:1 to 6:1 (did i say that right? oh well)
and we're having an all-team meeting on wednesday march 5 from 6:30-7:30 (i thought it was 5:00 but erin just sent out an email)...anyway, dinner will be provided :)
I CAN'T BELIEVE WE FOUND THE DRILL! GRR!!!
also, nandini and erin brought the weights to IDEO today so they could lose some weight (in case we make a separate tower thing for the flag) i'm not sure when we're getting them back though
i think we should repack for SVR (or not exactly repack, but reorganize whatever is in those crates and potentially bring more stuff b/c we have no weight limit...right?) i'm happy to do that but i'll have to do it this week b/c i have no time next week :(
WE NEED MORE DUCT TAPE! i can probably make an ace run for more stuff of the sort sometime this week //they went and bought this stuff today (yay for telling ace people that you're jon (J-O-N) rockman!)
after only a day, some of this is obsolete, but that's okay :)
we're also potentially changing the gear ratio for the arm from 4:1 to 6:1 (did i say that right? oh well)
and we're having an all-team meeting on wednesday march 5 from 6:30-7:30 (i thought it was 5:00 but erin just sent out an email)...anyway, dinner will be provided :)
I CAN'T BELIEVE WE FOUND THE DRILL! GRR!!!
also, nandini and erin brought the weights to IDEO today so they could lose some weight (in case we make a separate tower thing for the flag) i'm not sure when we're getting them back though
i think we should repack for SVR (or not exactly repack, but reorganize whatever is in those crates and potentially bring more stuff b/c we have no weight limit...right?) i'm happy to do that but i'll have to do it this week b/c i have no time next week :(
WE NEED MORE DUCT TAPE! i can probably make an ace run for more stuff of the sort sometime this week //they went and bought this stuff today (yay for telling ace people that you're jon (J-O-N) rockman!)
debrief
more coming on this soon - we had an all-team debrief today. we got a lot of really good feedback about what worked well this season, what didn't... what people want from the future, etc. it's all documented on postit notes so i'll try to type those up to archive. the feedback is actually extremely useful. it's great to know what people enjoyed doing and what people didn't. that being said, communication should not stop. we're always open to respectful suggestions and comments.
thank you to everyone who attended, and if you didn't i'll hopefully archive all those color coded postit notes soon! that way we'll actually be able to followthrough and change things next year.
it was so fulfilling to hear that both picasa and the blog are being actually used rather than just spending the time and no one using the features.
see you all next weekend for SVR!!!! i'm really excited :)
please do come (practice matches thursday, qualification matches all day friday, until lunch saturday and elimination/playoff after lunch. awards ceremonies both fri and sat evenings.)
we'll be swapping out the lead screw on thursday and benji(tong) will be back and better than ever by friday!
thank you to everyone who attended, and if you didn't i'll hopefully archive all those color coded postit notes soon! that way we'll actually be able to followthrough and change things next year.
it was so fulfilling to hear that both picasa and the blog are being actually used rather than just spending the time and no one using the features.
see you all next weekend for SVR!!!! i'm really excited :)
please do come (practice matches thursday, qualification matches all day friday, until lunch saturday and elimination/playoff after lunch. awards ceremonies both fri and sat evenings.)
we'll be swapping out the lead screw on thursday and benji(tong) will be back and better than ever by friday!
Monday, March 03, 2008
portland! (+svr)
so we're back from portland!
we did really well, esp compared to last year. final ranking was 10th out of 55, and due to the top 8 teams choosing within themselves, we were the captains of the 7th seeded alliance! (we seem to have a thing for being seventh.) playing against 488xbot and 100woodsidecarlmont, we did lose in the quarterfinals.
judges were genuinely interested in our team. being the only allfemale team in portland, we had a corner pit and many many judges and their friends chatted away to us. :) this is a very good sign.
we we'll be back and better by svr! march 13, 14, 15. get pumped.
we're swapping out the lead screw for one with a higher pitch. that way, we'll actually use the arm since it will be faster.
i found the drill in the silent study room this morning... not quite sure how it got there.
time to start planning for svr and our chairman's presentation. thanks to emily for the huuuuuge ass poster.
i'm working on code documentation, so that will be doen by svr.
an ENORMOUS thank you to mr rockman, ms o'malley, emily, karlin and ms mourad for coming with us. :) [and that lebanese food was ammmmazing]
we did really well, esp compared to last year. final ranking was 10th out of 55, and due to the top 8 teams choosing within themselves, we were the captains of the 7th seeded alliance! (we seem to have a thing for being seventh.) playing against 488xbot and 100woodsidecarlmont, we did lose in the quarterfinals.
judges were genuinely interested in our team. being the only allfemale team in portland, we had a corner pit and many many judges and their friends chatted away to us. :) this is a very good sign.
we we'll be back and better by svr! march 13, 14, 15. get pumped.
we're swapping out the lead screw for one with a higher pitch. that way, we'll actually use the arm since it will be faster.
i found the drill in the silent study room this morning... not quite sure how it got there.
time to start planning for svr and our chairman's presentation. thanks to emily for the huuuuuge ass poster.
i'm working on code documentation, so that will be doen by svr.
an ENORMOUS thank you to mr rockman, ms o'malley, emily, karlin and ms mourad for coming with us. :) [and that lebanese food was ammmmazing]
Wednesday, February 20, 2008
ditto anne's post.
THANK YOU to anyone and everyone who made this possible.
we DID it, guys! :]
that said, we leave for portland wednesday and have plenty to do before then.
on top of anne's stuff we need
-a complete bill of materials
-stuff for chairmans //not until svr
-programming compilation
(wow, it's reflex to comment out stuff now. eek)
woodie flowers and chairman's are getting submitted tomorrow.
now go catch up on sleep and relax until school starts.
THANK YOU to anyone and everyone who made this possible.
we DID it, guys! :]
that said, we leave for portland wednesday and have plenty to do before then.
on top of anne's stuff we need
-a complete bill of materials
-stuff for chairmans //not until svr
-programming compilation
(wow, it's reflex to comment out stuff now. eek)
woodie flowers and chairman's are getting submitted tomorrow.
now go catch up on sleep and relax until school starts.
Tuesday, February 19, 2008
SHIP SHIP SHIP!!!
WE SHIPPED THE ROBOT!!! :D
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
Friday, February 15, 2008
to dooooo in the next five days
in no particular order
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
Wednesday, February 13, 2008
wednesday
hey
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
Tuesday, February 12, 2008
monday and tuesday
MONDAY
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
Saturday, February 09, 2008
saturday
today was just one of those robotics days
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
Friday, February 08, 2008
Wednesday, February 06, 2008
long time no blogging...
yay to anne for picking up my blogging slack!
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
Tuesday, February 05, 2008
4 gearboxes and we need a gripper... :(
YAY I'M BLOGGING!!!
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
Tuesday, January 29, 2008
COMPILED CODE!
so i got the other code compiling too...
:)
apparently we can't have a 255 x 255 array. because that's hella big.
so now it's 5 by 5. but at least it compiles!
so maybe we should come up with a new idea for drive code? or something without a 64000 value array.
also, we're eating the leftover amazing pizza from il fornaio. yum yum. it was even better yesterday, too.
:)
apparently we can't have a 255 x 255 array. because that's hella big.
so now it's 5 by 5. but at least it compiles!
so maybe we should come up with a new idea for drive code? or something without a 64000 value array.
also, we're eating the leftover amazing pizza from il fornaio. yum yum. it was even better yesterday, too.
Monday, January 28, 2008
schedule
damn, i'm really forgetful tonight
this week's schedule
monday: 4:30-9:00 at IDEO
tuesday: 4:00-7:00 at Castilleja
wednesday: 4:00-9:00, going to IDEO at 5:30
thursday: 4:00-7:00 at Castilleja
Friday: 4:00-7:00 at Castilleja
Saturday&Sunday: 11-5 at Castilleja
oh, and for anyone interested, fomf's this weekend.
i actually do think that's all for tonight.
gnight. get some sleep, yes?
this week's schedule
monday: 4:30-9:00 at IDEO
tuesday: 4:00-7:00 at Castilleja
wednesday: 4:00-9:00, going to IDEO at 5:30
thursday: 4:00-7:00 at Castilleja
Friday: 4:00-7:00 at Castilleja
Saturday&Sunday: 11-5 at Castilleja
oh, and for anyone interested, fomf's this weekend.
i actually do think that's all for tonight.
gnight. get some sleep, yes?
rip scotty
and on saturday, they gutted poor scotty.
so he's brainless and heartless now (but we have his guts ahahahahhaaa)
at least the ramps should still deploy?
he was a good robot. slightly-to-majorly ghetto, but still. a good robot.
so he's brainless and heartless now (but we have his guts ahahahahhaaa)
at least the ramps should still deploy?
he was a good robot. slightly-to-majorly ghetto, but still. a good robot.
monday 1.28
wow.
so today, anne, caroline, erin and i went to allan steel (thank you marsha!) and met doug and emily there, where we bought 38 pounds (including some extra) of 6061 aluminum extrusion.
headed over to ideo, where four of the builders set about making sure the mecanum (pr: mecknm? meck-AN-um? meck-uh-nm?) wheels are properly functioning.
jimmy welded us a beyootiful shining chassis! well, actually he was still going strong when (sniff) we all had to leave. but on wednesday, i bet we'll see a gorgeous chassis!
hopefully we can get it up and driving by wednesday night, our next late ideo night.
on the coding side, i know erin and caroline are basically still receiving the same frustrating error message. but i THINK i know what the problem is... the same one i had.
you can't call a .h file in both user_routines.c as well as your functionfile.c. so i solved that problem by taking the #define and really necessary shit and just putting in it filtering.c, and then not calling filtering.h in that .c file. i only called in it .c.
after a good chunk of frustrating debugging, my code finalllllllly compiled! whether it actually does what we want it to, well, i suppose we'll find out? printf's are lovely things.
i believe the new toughbox gearboxes (to take two motors in one, i think?) should be coming in tomorrow night, so a couple builders should head over in the afternoon to get those all set up.
thankkkkk you to doug emily david tiffany and jimmy for all being there tonight.
so today, anne, caroline, erin and i went to allan steel (thank you marsha!) and met doug and emily there, where we bought 38 pounds (including some extra) of 6061 aluminum extrusion.
headed over to ideo, where four of the builders set about making sure the mecanum (pr: mecknm? meck-AN-um? meck-uh-nm?) wheels are properly functioning.
jimmy welded us a beyootiful shining chassis! well, actually he was still going strong when (sniff) we all had to leave. but on wednesday, i bet we'll see a gorgeous chassis!
hopefully we can get it up and driving by wednesday night, our next late ideo night.
on the coding side, i know erin and caroline are basically still receiving the same frustrating error message. but i THINK i know what the problem is... the same one i had.
you can't call a .h file in both user_routines.c as well as your functionfile.c. so i solved that problem by taking the #define and really necessary shit and just putting in it filtering.c, and then not calling filtering.h in that .c file. i only called in it .c.
after a good chunk of frustrating debugging, my code finalllllllly compiled! whether it actually does what we want it to, well, i suppose we'll find out? printf's are lovely things.
i believe the new toughbox gearboxes (to take two motors in one, i think?) should be coming in tomorrow night, so a couple builders should head over in the afternoon to get those all set up.
thankkkkk you to doug emily david tiffany and jimmy for all being there tonight.
all in all, a productive night. i'm happy.
Sunday, January 27, 2008
sunday
coding today...
me (sherri) tried to take the joystick values and make a filter
erin and caroline tried to actually write drive code
except that debugging is a PAIN.
so basically, that's all
i'm not sure what else to say, really
there's an up and runnign electronics board
DRIVING TOMORROW NIGHT?! hopefully.
me (sherri) tried to take the joystick values and make a filter
erin and caroline tried to actually write drive code
except that debugging is a PAIN.
so basically, that's all
i'm not sure what else to say, really
there's an up and runnign electronics board
DRIVING TOMORROW NIGHT?! hopefully.
January 26, 2008 IDEO
The mecanum wheels are done. Five of us went to IDEO and used the arbor press!!! (My dream has come true) We took the wheels apart in a speed contest which I won with lots of time to spare. We pressed the new bearings into the wheels to get rid of some of the weight of the bearings from the inside of the kit wheels. Nandini and Emily worked with the jack/ lead screw so it now is attached to the van door motor(?) Emily drilled a hole in it on the lathe. (we checked on her every five minutes) Then she threaded it and screwed it onto the motor shaft. There is a platform attached to the lead screw so that someone can put pressure on the lead screw to test the torque of the motor. The platform is also a possible way to attach the lead screw to the arm. The motor still turns with Nandini putting most of her weight on it. This was basically how we spent three hours at IDEO.
Saturday 1.26.08 at Castilleja
So those of us that didnt go to IDEO yesterday worked on the electronics board. David and I set up the electronics board, while the recruits learned to solder and clamp-smush. Once we got the board running, we realized that the motors were not both going forward when the joystick was forward (obviously a problem). So we tested a number of things. the speed-controllers, the motors, the connections. Only to learn today that they were just oriented wrong on the table top. Also, we couldnt figure out why when the motors were going forward, one set of pwm lights was green (full-forward) and one was red (full-backward). Today we figured out that the motors were turning in opposite directions when they were at 90 degree angles from each other because when they were on top of each other they would be turning the same direction. and so finally we had to solve the problem of them starting at different times. Since a motor being backdriven takes more torque to start, one motor was always lagging behind the other. So we are now trying to fix that in our code. now its sunday around 1:00.
Thursday, January 24, 2008
wheels
(From ginna)
Wheels
On wednesday David Anne and I put together the mecanum wheels with the bearings from last year's wheels inside. We measured the width of the bearings and the width of the spacers that were inside of the mecanum wheels and the bearings were 3mm short. To temporarily take care of the change in width we layered tape onto the plastic around the bearings. Since the bearings have two sides of plastic parts that could come loose, we decided to use three of the holes to hold the sides together with screws and bolts. The other three holes were used to hold the complete wheels together. We then noticed that the sprocket must be spaced apart from the wheel so that the chain won't hit the wheels.
Wheels
On wednesday David Anne and I put together the mecanum wheels with the bearings from last year's wheels inside. We measured the width of the bearings and the width of the spacers that were inside of the mecanum wheels and the bearings were 3mm short. To temporarily take care of the change in width we layered tape onto the plastic around the bearings. Since the bearings have two sides of plastic parts that could come loose, we decided to use three of the holes to hold the sides together with screws and bolts. The other three holes were used to hold the complete wheels together. We then noticed that the sprocket must be spaced apart from the wheel so that the chain won't hit the wheels.
Wednesday, January 23, 2008
i totally can't believe i forgot about this...
EMILY'S AWESOME CLAW THING.
because she was "bored", she lasercammed (sp?) this awesome actuating by a slider claw thing out of foam core. it is SO cool.
we attached it onto the 80-20 elevator. definitely have to have some sort of thing to fold up the claw or at least make it smaller to fit within the 28-38-60 initial box.
it's really really cool. it makes me so happy.
EMILY'S AWESOME CLAW THING.
because she was "bored", she lasercammed (sp?) this awesome actuating by a slider claw thing out of foam core. it is SO cool.
we attached it onto the 80-20 elevator. definitely have to have some sort of thing to fold up the claw or at least make it smaller to fit within the 28-38-60 initial box.
it's really really cool. it makes me so happy.
wednesday
wednesday mentor night!
much thanks to emily, doug, jessa, and david. :)
doug helped us go into more detail about the arrays. how to make 3d arrays, etc. jessa went over what algorithm we currently use to turn the joysticks, and how it's actually incredibly inefficient. only like half of all joystick positions are actually legit.... a bunch of them all mean the same thing. so maybe we can take the "Real" values and stretch them out.
i feel like i understand the theory and concepts of what we want to do to get the thing driving smoother. i just want to start doing it! like the ideas make sense, but i couldnt sit down with a laptop and just type it out.
chassis stuff is started! we have cut lists, and sketches and dimensions. allan steel run monday afternoon? a couple of us will go, be back by 4ish, probably.
defffinitely 1 layer this year. we measured a piece of last year's aluminum and it's 4oz/6in with a 1/8 in wall. that is HEAVY. hopefully for at least part of the bot, we can use thinner stuff. maybe one sixteenth?
david was doing some mecanum wheel stuff. i wasn't doing that, so i dont have details. maybe i can rope anndini/ginna/whoever into posting about that.... there was some sawing and mounting and such things.
i'm really excited to get this stuff up and running. i second the idea that these wheels are "pimpin". they are awesome. coding them is going to be fun.
ideo run tomorrow, around sixish? emily said that jimmy wants to start building next monday. so i guess after we get parts, we'll shimmy on over. :)
thanks to goel family for chaperoning and tasty food.
much thanks to emily, doug, jessa, and david. :)
doug helped us go into more detail about the arrays. how to make 3d arrays, etc. jessa went over what algorithm we currently use to turn the joysticks, and how it's actually incredibly inefficient. only like half of all joystick positions are actually legit.... a bunch of them all mean the same thing. so maybe we can take the "Real" values and stretch them out.
i feel like i understand the theory and concepts of what we want to do to get the thing driving smoother. i just want to start doing it! like the ideas make sense, but i couldnt sit down with a laptop and just type it out.
chassis stuff is started! we have cut lists, and sketches and dimensions. allan steel run monday afternoon? a couple of us will go, be back by 4ish, probably.
defffinitely 1 layer this year. we measured a piece of last year's aluminum and it's 4oz/6in with a 1/8 in wall. that is HEAVY. hopefully for at least part of the bot, we can use thinner stuff. maybe one sixteenth?
david was doing some mecanum wheel stuff. i wasn't doing that, so i dont have details. maybe i can rope anndini/ginna/whoever into posting about that.... there was some sawing and mounting and such things.
i'm really excited to get this stuff up and running. i second the idea that these wheels are "pimpin". they are awesome. coding them is going to be fun.
ideo run tomorrow, around sixish? emily said that jimmy wants to start building next monday. so i guess after we get parts, we'll shimmy on over. :)
thanks to goel family for chaperoning and tasty food.
Tuesday, January 22, 2008
monday!
yesterday was a quiet day... just annie, tobi, anne, allie, and me. (plus sallie after seussical practice) on the mentor side, we had karlin and doug.
we set about changing the wheels to the kit wheels, which have a smaller diameter. i'm guessing six inches, but i made that up. anyway... the large excitement for the day
WE GOT THE PROTOTYPE DRIVING WITH OUR DRIVE CODE! okay, fine it's scotty's code. so it's not exactly the most stable. especially since the back? front? (i'm confused by the direction of the thing) wheels aren't connected. there is much tippage.
it's a step, though. a big step.
(finding the bearings was also cause for much excitement. i didnt know they were missing.)
as they posted, tobi and annie made a better protoype of the threeprong with one actuating.
we need to be prototyping a threeprong with TWO actuating.
no one really seems to know/want to create chassis sketches. i have no idea what that entails, really, but i feel like we should at least be seriously, logically considering what we'll be needing. only 28 days, people!
karlin did some analysis of the drive code from last year on her laptop.
and after much struggle, we FINALLY found last years code, logically enough, on emily, in a folder entitled "backup code 2007". what shock!
that's about all, really.
i've been pushign this for a while. let's integrate the different components. attach the claw to the elevator to the chassis! at least see how it all will or wont fit together.
we set about changing the wheels to the kit wheels, which have a smaller diameter. i'm guessing six inches, but i made that up. anyway... the large excitement for the day
WE GOT THE PROTOTYPE DRIVING WITH OUR DRIVE CODE! okay, fine it's scotty's code. so it's not exactly the most stable. especially since the back? front? (i'm confused by the direction of the thing) wheels aren't connected. there is much tippage.
it's a step, though. a big step.
(finding the bearings was also cause for much excitement. i didnt know they were missing.)
as they posted, tobi and annie made a better protoype of the threeprong with one actuating.
we need to be prototyping a threeprong with TWO actuating.
no one really seems to know/want to create chassis sketches. i have no idea what that entails, really, but i feel like we should at least be seriously, logically considering what we'll be needing. only 28 days, people!
karlin did some analysis of the drive code from last year on her laptop.
and after much struggle, we FINALLY found last years code, logically enough, on emily, in a folder entitled "backup code 2007". what shock!
that's about all, really.
i've been pushign this for a while. let's integrate the different components. attach the claw to the elevator to the chassis! at least see how it all will or wont fit together.
Monday, January 21, 2008
3-prong Prototype
Tobi and I made a 3-prong arm prototype out of PVC pipe, where the bottom two are passive and the top arm moves to hold the ball in. It is basically just an updated and more carefully measured version of the previous one whose joint was held together with duct tape. Unfortunately, we didn't measure the width between the two passive prongs, and it is 32", not 28", but hopefully that won't be too hard to fix. From front to back, it is 41", and at it's tallest, it is about 50".
Sunday, January 20, 2008
further updates...
okay so saturday we:
-talked a lot about jackscrews (TEFLON coated ones ;D) and how they are an effective elevator
-messed around on solidworks with the "second-degree lever"/"3 bar linkage" concept (i have no idea what to call it)
-prototyped that concept in foam core
-learned some math/physics from tiffany and david
-went through 2006 drive code, messed around to see what the exact calculations and graphs looked like with karlin
-finished those pesky gearboxes annnnnd....
-...got the prototype up and running! (ish. it was only the gut strange whatever code that FIRST already has for us. BUT wheels turned when we messed around with the joysticks! so exciting.)
today
we attempted to find last years drive code (Failed. where IS it?!) and learned about programming basics from doug. jessa was going into some physics/mathy stuff with build, i know.
we also stepped up the prototyping level: the whatever-you-want-to-call-it (hopefully we'll have pics/video on picasa soon! it's really really cool.) is now prototyped in 80-20.
i'm not going to lie, i'm slighly worried about size constraints. has anyone figured out what our robot's full span is going to be? where is this arm mounted? the length of just the chassis will be approx. 40 inches. then we add the arm. then the claw... even while still prototyping, i think we need to integrate the systems. crappily, maybe, but just get an arm ON the chassis, and see how things work when we put them together. what the big picture looks like.
the sooner we get drive code (even if we just copy old drive code from previous years) on the prototype, the sooner we can practice driving. which is superduper important for this year's challenge.
in hindsight, i really wish we had taken the effort in the offseason to properly learn solidworks. visualizing everything together is great, but we rely on emily for that. which is okay, but wouldn't it be nice if we could just do it ourselves?
a huge THANK YOU to mentors and parents for their support. emily, eric, karlin, david, tiffany, doug, jimmy, jessa... thanks.
thank you anne's family for the yummy pears, divya's for the snack food, and the jasuja's for the awesome aloo mutter and rice. yum yum. :) we eat well.
-talked a lot about jackscrews (TEFLON coated ones ;D) and how they are an effective elevator
-messed around on solidworks with the "second-degree lever"/"3 bar linkage" concept (i have no idea what to call it)
-prototyped that concept in foam core
-learned some math/physics from tiffany and david
-went through 2006 drive code, messed around to see what the exact calculations and graphs looked like with karlin
-finished those pesky gearboxes annnnnd....
-...got the prototype up and running! (ish. it was only the gut strange whatever code that FIRST already has for us. BUT wheels turned when we messed around with the joysticks! so exciting.)
today
we attempted to find last years drive code (Failed. where IS it?!) and learned about programming basics from doug. jessa was going into some physics/mathy stuff with build, i know.
we also stepped up the prototyping level: the whatever-you-want-to-call-it (hopefully we'll have pics/video on picasa soon! it's really really cool.) is now prototyped in 80-20.
i'm not going to lie, i'm slighly worried about size constraints. has anyone figured out what our robot's full span is going to be? where is this arm mounted? the length of just the chassis will be approx. 40 inches. then we add the arm. then the claw... even while still prototyping, i think we need to integrate the systems. crappily, maybe, but just get an arm ON the chassis, and see how things work when we put them together. what the big picture looks like.
the sooner we get drive code (even if we just copy old drive code from previous years) on the prototype, the sooner we can practice driving. which is superduper important for this year's challenge.
in hindsight, i really wish we had taken the effort in the offseason to properly learn solidworks. visualizing everything together is great, but we rely on emily for that. which is okay, but wouldn't it be nice if we could just do it ourselves?
a huge THANK YOU to mentors and parents for their support. emily, eric, karlin, david, tiffany, doug, jimmy, jessa... thanks.
thank you anne's family for the yummy pears, divya's for the snack food, and the jasuja's for the awesome aloo mutter and rice. yum yum. :) we eat well.
a short update
we have made some good progress over the past few days. Yesterday was especially productive. we succeeded in finishing the assembly of the gearboxes and mounted them on the robot. then, we thought about another lift design and did some math to determine if we had a motor that was strong enough to power it (I don't think that we actually ended up finding out how much power we need, but we will do that soon). today we tried to download last year's code onto the prototype chassis (unsuccessfully) and will hopefully work on the drive code with jessa later. that's all for now
Thursday, January 17, 2008
thursday. 33 days.
if we're judging strictly by physical progress, today was not a productive day (although i dont actually know what's going on with that chassis). general design and administrative stuff is going well though.
i know that those gear boxes and transmission stuff has been keeping build/anndini/allie/crystal very busy. "the shuttle" of me, anne, and allie had to leave by 7:15 to get anne on that train, so i have no clue whether more progress was made on the chassis, or if we could drive by the end of the evening.
driving that prototype chassis has been our nightly goal basically this entire week. i'm really seriously hoping that it WILL happen tomorrow. i know electronics needs to basically feed the brain (remembering that we are using an OLD RC and accomodating for its withered brains) in order to get it actually functioning.
i'm really wanting to mess around with drive code this weekend (can't be at LEAST get scotty up and running? is his poor chain that badly off?) and see whether the window filtering, etc that we learnt about wednesday actually sunk into our brains. it sounds like it would smooth out so many of those problems from last year.
after multiple pro-con lists and design meetings and prototypes, i think we're 90% sure we want to go for a threeprong claw on some sort of lift. how to actually make this feasible while fitting within the topless 80in cylinder AND not tipping over because of our center of gravity? i have no idea. jesse and karlin were chatting about that with us.
reasons for eliminating other ideas: windmill idea, while incredibly cool is HUGE, fairly complex and would require a lot of torque and precision. a lot of people were really committed to hurdling, so a three prong without a lift would not allow that. with a lift, if it fails, hopefully the claw will be functional and we can just be a low, speedy bot.
the three prong claw has a, uh, rather ghetto prototype made out of pvc (hello, i love you) and duct tape.
(lack-of-an)update on the mecanum wheels: they have not been shipped yet, so really, i have no clue when they'll be arriving. there were no shipping.
generally, that was the gist of things.
maybe i can blackmail anne/crystal/nandini/someone into posting about the nuts and bolts (literally, i suppose) of the chassis progress.
shouldn't we start making BoMs and dimensions and ordering (after getting jimmy's permission, of course ;P) parts and stuff for the chassis, if not the robot in general? that way, when we finally actually want to build something we'll be able to? i dont know what protocol for this is.
anyway. those are my random thoughts of the night.
see all tomorrow!
again, weekend hours of 11-5. 4-7:30ish tmrw.
i know that those gear boxes and transmission stuff has been keeping build/anndini/allie/crystal very busy. "the shuttle" of me, anne, and allie had to leave by 7:15 to get anne on that train, so i have no clue whether more progress was made on the chassis, or if we could drive by the end of the evening.
driving that prototype chassis has been our nightly goal basically this entire week. i'm really seriously hoping that it WILL happen tomorrow. i know electronics needs to basically feed the brain (remembering that we are using an OLD RC and accomodating for its withered brains) in order to get it actually functioning.
i'm really wanting to mess around with drive code this weekend (can't be at LEAST get scotty up and running? is his poor chain that badly off?) and see whether the window filtering, etc that we learnt about wednesday actually sunk into our brains. it sounds like it would smooth out so many of those problems from last year.
after multiple pro-con lists and design meetings and prototypes, i think we're 90% sure we want to go for a threeprong claw on some sort of lift. how to actually make this feasible while fitting within the topless 80in cylinder AND not tipping over because of our center of gravity? i have no idea. jesse and karlin were chatting about that with us.
reasons for eliminating other ideas: windmill idea, while incredibly cool is HUGE, fairly complex and would require a lot of torque and precision. a lot of people were really committed to hurdling, so a three prong without a lift would not allow that. with a lift, if it fails, hopefully the claw will be functional and we can just be a low, speedy bot.
the three prong claw has a, uh, rather ghetto prototype made out of pvc (hello, i love you) and duct tape.
(lack-of-an)update on the mecanum wheels: they have not been shipped yet, so really, i have no clue when they'll be arriving. there were no shipping.
generally, that was the gist of things.
maybe i can blackmail anne/crystal/nandini/someone into posting about the nuts and bolts (literally, i suppose) of the chassis progress.
shouldn't we start making BoMs and dimensions and ordering (after getting jimmy's permission, of course ;P) parts and stuff for the chassis, if not the robot in general? that way, when we finally actually want to build something we'll be able to? i dont know what protocol for this is.
anyway. those are my random thoughts of the night.
see all tomorrow!
again, weekend hours of 11-5. 4-7:30ish tmrw.
Wednesday, January 16, 2008
Wanna know what us mentors are thinking?
Read our blog: http://gatorbotics-friends.blogspot.com/
And definitely check out photos on Picasa . . .
http://picasaweb.google.com/castilleja.robotics/Week2Photos2008

And definitely check out photos on Picasa . . .
http://picasaweb.google.com/castilleja.robotics/Week2Photos2008
t-34 days left!
wow.
today was a long, but definitely productive day.
first off, thank you to jessa, emily, doug, and david to devoting their evening and energy.
also, thanks to david for the masssssive box of cookies!
caroline and i first took an... entertaining run to ACE for pvc joints. we now have a rewards card, on the bulletin board in the project room. please do actually use them.
anyway, the joints. we wants to pvc the three-prong claw idea. we'll work on it more tomorrow, but currently, we're limited because the angles of the joints are not exact. also, we really dont know what we would want the angles to be. (or i don't.)
we did some math to figure out what some distances would have to be.
over dinner, emily showed up spiffy solidworks designs of potential arms. wow.
looked at some four-bar linkage stuff, which looks really cool. we still have so many ideas floating around, i think it's definitely time to just sit down and commit to one idea, while still tinkering with a simpler backup. thoughts? our general strategy is so up in the air right now
chassis stuff is getting there, though. i know david was helping anndini & allie with some of that after dinner. mecanum wheels HAVE been ordered. when they'll get here, who knows?
we apparently have some conflicting information about whether you can use skid steer on mecanum wheels. if we can, i think that's definitely something to explore.
in the meantime, doug and emily gave us some awesome programming information about window filtering, and arrays, and global variables, switch debounching, and other cool stuff for having a smoother drivetrain and also just general information. wow. we definitely took the simple way out last year. i don't even know how poor scotty drives.
if we can get the chain on scotty functional, or the prototype chassis up and running, it would definitely be good to start messing with code.
thank you to sallie and ginna for staying through the potentially intimidating programming lecture. definitely ask questions when you're confused.
there are pictures of the notes on picasa.
i feel like i'm missing something critical that we talked about... hmph.
basically the moral of the story is that today was really really productive. it would be more productive if we knew what we wanted our end result to either look like or do. either one. design or general strategy.
things to decide:
-basic direction of chassis. "Fat" vs. narrow
-are we even hurdling to begin with?
-mecanum wheels
--if yes, skid steer or actually sliding!?!
-if we are hurdling, what's the arm/elevator/lift/gripper/whatever? windmill? fourbar?
--how can we get a prototype of a fourbarlinkage going? the solidworks gave us a good idea of roughly how it'll work, but actual details would be good.
-basically everything.
hopefully over this weekend we'll be able to get a lot accomplished. we'll get there. we're getting there.
today was a long, but definitely productive day.
first off, thank you to jessa, emily, doug, and david to devoting their evening and energy.
also, thanks to david for the masssssive box of cookies!
caroline and i first took an... entertaining run to ACE for pvc joints. we now have a rewards card, on the bulletin board in the project room. please do actually use them.
anyway, the joints. we wants to pvc the three-prong claw idea. we'll work on it more tomorrow, but currently, we're limited because the angles of the joints are not exact. also, we really dont know what we would want the angles to be. (or i don't.)
we did some math to figure out what some distances would have to be.
over dinner, emily showed up spiffy solidworks designs of potential arms. wow.
looked at some four-bar linkage stuff, which looks really cool. we still have so many ideas floating around, i think it's definitely time to just sit down and commit to one idea, while still tinkering with a simpler backup. thoughts? our general strategy is so up in the air right now
chassis stuff is getting there, though. i know david was helping anndini & allie with some of that after dinner. mecanum wheels HAVE been ordered. when they'll get here, who knows?
we apparently have some conflicting information about whether you can use skid steer on mecanum wheels. if we can, i think that's definitely something to explore.
in the meantime, doug and emily gave us some awesome programming information about window filtering, and arrays, and global variables, switch debounching, and other cool stuff for having a smoother drivetrain and also just general information. wow. we definitely took the simple way out last year. i don't even know how poor scotty drives.
if we can get the chain on scotty functional, or the prototype chassis up and running, it would definitely be good to start messing with code.
thank you to sallie and ginna for staying through the potentially intimidating programming lecture. definitely ask questions when you're confused.
there are pictures of the notes on picasa.
i feel like i'm missing something critical that we talked about... hmph.
basically the moral of the story is that today was really really productive. it would be more productive if we knew what we wanted our end result to either look like or do. either one. design or general strategy.
things to decide:
-basic direction of chassis. "Fat" vs. narrow
-are we even hurdling to begin with?
-mecanum wheels
--if yes, skid steer or actually sliding!?!
-if we are hurdling, what's the arm/elevator/lift/gripper/whatever? windmill? fourbar?
--how can we get a prototype of a fourbarlinkage going? the solidworks gave us a good idea of roughly how it'll work, but actual details would be good.
-basically everything.
hopefully over this weekend we'll be able to get a lot accomplished. we'll get there. we're getting there.
Monday, January 14, 2008
what does em stand for?
...why, extraordinary mentor, of course!
basically, she is amazing. amazingly organized too. when we got to school today, and peeked in the project room.... WOW. i don't even know how to describe it. i have never ever seen it that clean or organized. we know that this shouldn't be a good thing, technically, because, uh, we should be organized. we're not. and thank you thank you thank you! chairs were pushed in. frankly, that just scared us a little. (we did actually mess the chairs up... too much creepy precision)
on a totally different note, can someone with admin priveleges already bump me up to admin too for the build blog (which i'm going to almost solely blog on starting now)
today was one of the few days off. i hope people enjoyed it... i got home at 3:30. wow. thanks to anne and crystal for walking over to ideo. i know they were hoping to get some gear box stuff going.
this week in terms of scheduling:
meeting mon-fri from roughly 4-7:30 (although we may or may not go later depending on mentors and goals for that night.) i know my family's chaperoning and food-ing tuesday and wednesday. let's fill in the schedule on the project room door. if people are good about writing stuff in, its a really useful tool.
mourad (we really need a nickname. dora? raddy? ratty? dorey? mo-rad? suggestions welcome) anyway the point is that she told me she has ordered our mecanum wheels from andymark. i'm totally excited to play around with those and learn how they work!
get ready for a spiffy 37 days left! i'm pumped.
basically, she is amazing. amazingly organized too. when we got to school today, and peeked in the project room.... WOW. i don't even know how to describe it. i have never ever seen it that clean or organized. we know that this shouldn't be a good thing, technically, because, uh, we should be organized. we're not. and thank you thank you thank you! chairs were pushed in. frankly, that just scared us a little. (we did actually mess the chairs up... too much creepy precision)
on a totally different note, can someone with admin priveleges already bump me up to admin too for the build blog (which i'm going to almost solely blog on starting now)
today was one of the few days off. i hope people enjoyed it... i got home at 3:30. wow. thanks to anne and crystal for walking over to ideo. i know they were hoping to get some gear box stuff going.
this week in terms of scheduling:
meeting mon-fri from roughly 4-7:30 (although we may or may not go later depending on mentors and goals for that night.) i know my family's chaperoning and food-ing tuesday and wednesday. let's fill in the schedule on the project room door. if people are good about writing stuff in, its a really useful tool.
mourad (we really need a nickname. dora? raddy? ratty? dorey? mo-rad? suggestions welcome) anyway the point is that she told me she has ordered our mecanum wheels from andymark. i'm totally excited to play around with those and learn how they work!
get ready for a spiffy 37 days left! i'm pumped.
Sunday, January 13, 2008
first week
39 days left!
i've been rather remiss in the blogging for the past couple days.
basically, there's a new design in the works. multiple, actually. i know emily/annie were definitely getting some action with the pvc pipe today. an overpass HAS been constructed. i'm not entirely sure whether it's precise proportions but it looks amaaaaazing. another idea is the three-prong one we've been working with for awhile.
also, are we really going to have an arm? we've all agreed that drive train and strong chassis is definitely the priority. but do we attempt an actuating arm as well?
and for that drive train... mecanum wheels will hopefully be ordered asap, mourad's been given the order. jimmy mentioned that you don't need to program them to slide? you can just use the same old drive code like for anything else? with skid steer? we'll obviously have to check that out.
there are a lot of ideas out there, and while we're beginning to experiment and start doing more serious prototyping, all the leads definitely want a small, focused design meeting with mentors. that's what saturday was planned to be, but it ended up being more general, which is okay. except that as such a young team, we definitely want your opinions and input as well as advice on how to proceed once we finally have a (temporarily) set design we want to aim for.
once again, are we "going fat"? decisions really need to start getting made, but i know we dont want to make those decisions without consulting the mentors as a group rather than individually, where we get conflicting opinions.
oh i just had a random thought: i think that maybe we should just combine the two blog and maybe tag the posts "programming" or "build"? because at least for now, i'm just posting the same thing in two places. and hopefully people are reading both. thoughts? comments?
all the newbies who were around on saturday HAVE been shoptrained (and got to make blocks. grrrr. ) jessa ran a programming 101 workshop, which was definitely useful. so now hopefully sallie, neli, and divya (somewhat) get programming. yay! that's wayyyy farther than programming was last year. i think at the end of the first week, we'd just received "C for dummies" and thought it was a godsend. :)
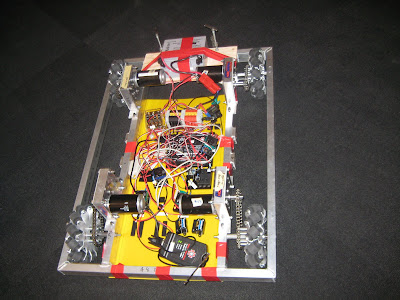
a temporary electronics board (complete with a battery mount, attached and all!) has been put on the prototype kit chassis. there are also wheels on there. now if only there can be motors. that will happen soon, i believe.
i'm sure there are more things that have happened. actually, i knowww there are more things that have happened. blanking out.
oh! does anyone remember where i put the lugs for the battey leads?! i distinctly remember being like "let's not forget where i'm putting these!" but we've completely forgotten. we need to find those.
thank you (Again!) to doug for providing us with retail therapy. thank you for all the mentors for your commitment and energy and enthusiasm and time. we appreciate it so much.
i'll post random thoughts as they come to me. this is all i have for now.
i've been rather remiss in the blogging for the past couple days.
basically, there's a new design in the works. multiple, actually. i know emily/annie were definitely getting some action with the pvc pipe today. an overpass HAS been constructed. i'm not entirely sure whether it's precise proportions but it looks amaaaaazing. another idea is the three-prong one we've been working with for awhile.
also, are we really going to have an arm? we've all agreed that drive train and strong chassis is definitely the priority. but do we attempt an actuating arm as well?
and for that drive train... mecanum wheels will hopefully be ordered asap, mourad's been given the order. jimmy mentioned that you don't need to program them to slide? you can just use the same old drive code like for anything else? with skid steer? we'll obviously have to check that out.
there are a lot of ideas out there, and while we're beginning to experiment and start doing more serious prototyping, all the leads definitely want a small, focused design meeting with mentors. that's what saturday was planned to be, but it ended up being more general, which is okay. except that as such a young team, we definitely want your opinions and input as well as advice on how to proceed once we finally have a (temporarily) set design we want to aim for.
once again, are we "going fat"? decisions really need to start getting made, but i know we dont want to make those decisions without consulting the mentors as a group rather than individually, where we get conflicting opinions.
oh i just had a random thought: i think that maybe we should just combine the two blog and maybe tag the posts "programming" or "build"? because at least for now, i'm just posting the same thing in two places. and hopefully people are reading both. thoughts? comments?
all the newbies who were around on saturday HAVE been shoptrained (and got to make blocks. grrrr. ) jessa ran a programming 101 workshop, which was definitely useful. so now hopefully sallie, neli, and divya (somewhat) get programming. yay! that's wayyyy farther than programming was last year. i think at the end of the first week, we'd just received "C for dummies" and thought it was a godsend. :)
a temporary electronics board (complete with a battery mount, attached and all!) has been put on the prototype kit chassis. there are also wheels on there. now if only there can be motors. that will happen soon, i believe.
i'm sure there are more things that have happened. actually, i knowww there are more things that have happened. blanking out.
oh! does anyone remember where i put the lugs for the battey leads?! i distinctly remember being like "let's not forget where i'm putting these!" but we've completely forgotten. we need to find those.
thank you (Again!) to doug for providing us with retail therapy. thank you for all the mentors for your commitment and energy and enthusiasm and time. we appreciate it so much.
i'll post random thoughts as they come to me. this is all i have for now.
Tuesday, January 08, 2008
monday and tuesday
i think for now the same postings will go on both blogs... we're not really doing anything separately
sorry for no post yesterday, and today will have to be quick
summary version: we have a basic arm idea. maybe i can get a picture in here somehow?
trying to finalize motors/potentiometers and how to mount, etc.
drive train: 6 wheels? or 4? definitely steering the front two. any input on how cars works would be greatly appreciated.
there has been some math-doing. :) but i assume there is more to come.
thank you thank you to karlin and tiffany for coming
and i believe there are cart designs in the works
a question: are we ACTUALLY going to use sketchup/solidworks? i think we should... if we know how.
we should start making BoMs and weight lists
that's all
sorry for no post yesterday, and today will have to be quick
summary version: we have a basic arm idea. maybe i can get a picture in here somehow?
trying to finalize motors/potentiometers and how to mount, etc.
drive train: 6 wheels? or 4? definitely steering the front two. any input on how cars works would be greatly appreciated.
there has been some math-doing. :) but i assume there is more to come.
thank you thank you to karlin and tiffany for coming
and i believe there are cart designs in the works
a question: are we ACTUALLY going to use sketchup/solidworks? i think we should... if we know how.
we should start making BoMs and weight lists
that's all
Sunday, January 06, 2008
we've kicked off!
hello!
the 2008 season has begun! build and programming are working together on the design process, so i've posted this to both blogs.
caroline, me, allie, and nandini headed down at the crack of dawn (literally...) saturday to recieve the challenge from sj state. this year's challenge, first overdrive, is different from any other challenge. effectively, it's a racetrack with oversized inflatable balls. these are the game pieces. it's really hard to describe - search for first overdrive 08 on youtube and you should find something. i think this should link to it: http://youtube.com/watch?v=GKBIEqY2Ak4
we had a great turnout for brainstorming session at school saturday. many mentors came, and thank you for that. we broke into groups and came up with many rough ideas.
then, today, with a smaller turnout (allie, caroline, anndini, annie c, sallie, crystal, mari, neli, me...) we presented our design ideas and began to PROTOTYPE! the two main arm concepts at this point are the shoulder-elbow-wrist extendable design, as recommended by jimmy and a forklift. very rough prototyping with 80/20 ensued. allie and i also put together the kit chassis as a prototype.
things to think about:
what is going to grip that thing? the ball is huge, and fairly slippery.
what is our overall strategy? i know we're hoping to go over rather than under the overpass, but are we going to place it on top at the end?
what's our priority?
hybrid?
sensors?
we've been discussing many different concepts for a drive train. obviously, scotty's will not work. we can't almost tip over every time we turn...
possibilities:
-mecanum wheels. like jester drive (is it possible to buy them? how difficult is the programming?)
-omni wheels (again. expensive. no experience with them)
-omni wheel/traction wheel combo. we saw a lot of this in atlanta
-power steering two smaller front wheel
-combination of casters and driven wheels
-anything i've forgotten
this is something we'll have to continue to think about.
oh, there's a schedule of deadlines on the project room whiteboard. that will come soon. we deffffinitely need to be testing far earlier this year, and spend less time on prototyping. i know we're hoping to have parents help out to build an overpass, and we want to make good use of that.
uh, also, can we get that leak in the closet taken care of? ...it makes me nervous.
a HUGE THANK YOU to doug for generally being an amazing source of information as well as providing the books and tools necessary. those hex screwdrivers will make everything so much easier. :D
also thanks to karlin for coming in to help us talk through concepts, and marsha abbott for chaperoning and yummy dips for the pita, as well as the costco run.
get ready for season! i'm excited. hopefully you are too. :)
the 2008 season has begun! build and programming are working together on the design process, so i've posted this to both blogs.
caroline, me, allie, and nandini headed down at the crack of dawn (literally...) saturday to recieve the challenge from sj state. this year's challenge, first overdrive, is different from any other challenge. effectively, it's a racetrack with oversized inflatable balls. these are the game pieces. it's really hard to describe - search for first overdrive 08 on youtube and you should find something. i think this should link to it: http://youtube.com/watch?v=GKBIEqY2Ak4
we had a great turnout for brainstorming session at school saturday. many mentors came, and thank you for that. we broke into groups and came up with many rough ideas.
then, today, with a smaller turnout (allie, caroline, anndini, annie c, sallie, crystal, mari, neli, me...) we presented our design ideas and began to PROTOTYPE! the two main arm concepts at this point are the shoulder-elbow-wrist extendable design, as recommended by jimmy and a forklift. very rough prototyping with 80/20 ensued. allie and i also put together the kit chassis as a prototype.
things to think about:
what is going to grip that thing? the ball is huge, and fairly slippery.
what is our overall strategy? i know we're hoping to go over rather than under the overpass, but are we going to place it on top at the end?
what's our priority?
hybrid?
sensors?
we've been discussing many different concepts for a drive train. obviously, scotty's will not work. we can't almost tip over every time we turn...
possibilities:
-mecanum wheels. like jester drive (is it possible to buy them? how difficult is the programming?)
-omni wheels (again. expensive. no experience with them)
-omni wheel/traction wheel combo. we saw a lot of this in atlanta
-power steering two smaller front wheel
-combination of casters and driven wheels
-anything i've forgotten
this is something we'll have to continue to think about.
oh, there's a schedule of deadlines on the project room whiteboard. that will come soon. we deffffinitely need to be testing far earlier this year, and spend less time on prototyping. i know we're hoping to have parents help out to build an overpass, and we want to make good use of that.
uh, also, can we get that leak in the closet taken care of? ...it makes me nervous.
a HUGE THANK YOU to doug for generally being an amazing source of information as well as providing the books and tools necessary. those hex screwdrivers will make everything so much easier. :D
also thanks to karlin for coming in to help us talk through concepts, and marsha abbott for chaperoning and yummy dips for the pita, as well as the costco run.
get ready for season! i'm excited. hopefully you are too. :)
Tuesday, February 20, 2007
Our nameless robot has been shipped!!!
Around 5:00 today, as we were wrapping plastic around the outside of our awesome crate, FedEx arrived to collect our robot! Enjoy your day off tomorrow, and get excited for packing stuff for portland on Thursday...
THINGS WE HAVE TO PACK FOR PORTLAND (in addition to tools, etc.)
-the radio for the robot that we accidentally forgot to pack into the crate after taking it off the
-chain tensioning delrin rod system
-grip tape
-emergency ramp kit: rivets, punch (for holes in surgical tubing), surgical tubing (about 3/8" outer diameter, 1/8" ID), box cutters, drill bit (in rivets bag), back-up plates (washers for pop rivets), cable and crimps...
-slides for bottom or ramp supports
-extra signs with school name, sponser, etc. (already printed)
-and more...think about what we need!
other:
-strategy
-figure out what to do about indicator light for which we're missing the relay...
good night--go catch up on all that lost sleep!
THINGS WE HAVE TO PACK FOR PORTLAND (in addition to tools, etc.)
-the radio for the robot that we accidentally forgot to pack into the crate after taking it off the
-chain tensioning delrin rod system
-grip tape
-emergency ramp kit: rivets, punch (for holes in surgical tubing), surgical tubing (about 3/8" outer diameter, 1/8" ID), box cutters, drill bit (in rivets bag), back-up plates (washers for pop rivets), cable and crimps...
-slides for bottom or ramp supports
-extra signs with school name, sponser, etc. (already printed)
-and more...think about what we need!
other:
-strategy
-figure out what to do about indicator light for which we're missing the relay...
good night--go catch up on all that lost sleep!
Monday, February 19, 2007
We're 121 lbs!!!...
...with a 12V battery.
After a moment of freaking out about needing to lose 11 lbs, we realized we hadn't removed the battery. The arm wasn't on the robot, however, so as far as we can tell, we're right at 110 lbs. At least we don't have to go through the extreme weight loss program as last year!
Oh yeah, did I mention we have sweet ramps that get released by a nifty flipper?! Ok, so maybe I shouldn't be so excited given we're shipping in less than 48 hrs, but I have to say I feel a lot less stressed than last year or the year before. We also have a gripper that's done, save maybe a few simple improvements tomorrow as we test.
I took some detail photos of the robot tonight, so if any of you readers want to build a copy of our robot...the pictures say it all, so I'll end my post with short list of things we might consider doing before we ship (should we have the time, that is, in some cases):
-color code for different allen key sizes
-spray paint 1700 on bumpers
-signage (sponsers,
-cart (at least get dimensions so we can do after ship, if it comes to that)
-stuff i can't remember because it's too late and my memory is going...
other:
-strategy
After a moment of freaking out about needing to lose 11 lbs, we realized we hadn't removed the battery. The arm wasn't on the robot, however, so as far as we can tell, we're right at 110 lbs. At least we don't have to go through the extreme weight loss program as last year!
Oh yeah, did I mention we have sweet ramps that get released by a nifty flipper?! Ok, so maybe I shouldn't be so excited given we're shipping in less than 48 hrs, but I have to say I feel a lot less stressed than last year or the year before. We also have a gripper that's done, save maybe a few simple improvements tomorrow as we test.
I took some detail photos of the robot tonight, so if any of you readers want to build a copy of our robot...the pictures say it all, so I'll end my post with short list of things we might consider doing before we ship (should we have the time, that is, in some cases):
-color code for different allen key sizes
-spray paint 1700 on bumpers
-signage (sponsers,
-cart (at least get dimensions so we can do after ship, if it comes to that)
-stuff i can't remember because it's too late and my memory is going...
other:
-strategy
Sunday, February 18, 2007
2 days left (plus a little...)
ACK!
And (surprise surprise) weight is an issue, though not as bad as last year. We're at about 107 lb without the ramp release mechanism or dampers or a few smaller things. Hmmm...
Ramps are almost done, meaning they're dampened, hinged, and supported; they just need some stronger springs. We made do with bungee cords tonight (to open up the secondary ramp), and it was pretty sweet. We did note the problem of getting the cable (connected to the ramp frame and the ramp support) caught around the ramp support...
A gripper idea in the works (suction-y), and we have a working design already.
To do:
ramp release mechanism
wheels/slides/whatever for end of ramp
finish putting grip tape on second ramp
cross-bracing for tower
(test ramps with paly?)
drill last mounting holes for bumpers
See pictures ;)
And (surprise surprise) weight is an issue, though not as bad as last year. We're at about 107 lb without the ramp release mechanism or dampers or a few smaller things. Hmmm...
Ramps are almost done, meaning they're dampened, hinged, and supported; they just need some stronger springs. We made do with bungee cords tonight (to open up the secondary ramp), and it was pretty sweet. We did note the problem of getting the cable (connected to the ramp frame and the ramp support) caught around the ramp support...
A gripper idea in the works (suction-y), and we have a working design already.
To do:
ramp release mechanism
wheels/slides/whatever for end of ramp
finish putting grip tape on second ramp
cross-bracing for tower
(test ramps with paly?)
drill last mounting holes for bumpers
See pictures ;)
Thursday, February 15, 2007
We're getting there
Somehow Jim and being at IDEO make everything work out. We're now done with the secondary ramps and have mounted a main ramp on hinges connected to the chassis (and removed it, so electronics could flip the chassis and drill a couple holes). Our next plan for action is to figure out how to mount the vertical ramp supports and the dampers on the ramps. I think we're sticking to the cable idea for aligning the supports. We also have somewhat of an idea to mount the dampers (we did all of this on our prototype!), but this needs some reworking because the top back chassis rail isn't one piece straight acros the width of the frame. Rather, there's a gap in the middle, leaving no room to mount a damper.
The gap is, however, a perfect fit (as it was intended to be) for the new gripper design that is similar to our previous design, except it has two prongs spaced >10" (the diameter of the spider arm circular plate). We need to finalize this tomorrow and fabricate it, too...and test it on THE RACK! Once this design is set, we also need to add cross bracing to the tower at heights that're appropriate for mounting touch sensors (to prevent the arm from rotating too much in either direction).
The battery mount is also in progress and will hopefully be done by the end of tomorrow.
On top of all the stuff already listed above, PLEASE READ THE LAST FEW BLOGS FOR OTHER THINGS THAT STILL NEED TO BE DONE.
[OI board? (currently we're using last year's--is this even legal?)
bumpers, signage, flag holder, etc.
crate! contact mr. reichling... (Kersten?)]
Little stuff that I don't want to be doing the night before/the day of ship...
A big thanks to Jim for staying with Chrissy and me these past few days until AFTER 10:00!!
The gap is, however, a perfect fit (as it was intended to be) for the new gripper design that is similar to our previous design, except it has two prongs spaced >10" (the diameter of the spider arm circular plate). We need to finalize this tomorrow and fabricate it, too...and test it on THE RACK! Once this design is set, we also need to add cross bracing to the tower at heights that're appropriate for mounting touch sensors (to prevent the arm from rotating too much in either direction).
The battery mount is also in progress and will hopefully be done by the end of tomorrow.
On top of all the stuff already listed above, PLEASE READ THE LAST FEW BLOGS FOR OTHER THINGS THAT STILL NEED TO BE DONE.
[OI board? (currently we're using last year's--is this even legal?)
bumpers, signage, flag holder, etc.
crate! contact mr. reichling... (Kersten?)]
Little stuff that I don't want to be doing the night before/the day of ship...
A big thanks to Jim for staying with Chrissy and me these past few days until AFTER 10:00!!
Tuesday, February 13, 2007
Ramps (cont.)
We're almost done with mounting the surfaces on one whole ramp (the main ramp is done, and we need to mount one more aluminum sheet, which has already been punched out, on the secondary ramp). Once that is done, we can work out how to mount the two pieces together, incorporate the support, and mount it all onto the chassis.
Along with the list of stuff in my previous blog, these things also have to get done:
Ramp release mechanism--I think we're at a point where we should be able to have it all ready to mount on the tower of power. Let's try to get that done within the next two days.
Gripper redesign--it turns out the design we've been planning to use doesn't work. Chrissy and I stayed really late trying to work something out, but this needs more thought.
We're going to IDEO tomorrow and getting there AT FIVE-THIRTY (5:30!!!! NO LATER PLEASE!!!). Maybe you've noticed we've been getting there a half hour late every time, which is bad because we HAVE TONS TO DO (and we're wasting Jim's time if we're not there)!!!
When we go, we need to take:
-The chassis and arm (if programming is ok with this...if not, maybe they can follow)
-A battery (so we can weld a mount onto the chassis)
-Notebooks
-That bag with safety glasses and that 1.5' piece of pvc
-and probably other stuff, too...
Along with the list of stuff in my previous blog, these things also have to get done:
Ramp release mechanism--I think we're at a point where we should be able to have it all ready to mount on the tower of power. Let's try to get that done within the next two days.
Gripper redesign--it turns out the design we've been planning to use doesn't work. Chrissy and I stayed really late trying to work something out, but this needs more thought.
We're going to IDEO tomorrow and getting there AT FIVE-THIRTY (5:30!!!! NO LATER PLEASE!!!). Maybe you've noticed we've been getting there a half hour late every time, which is bad because we HAVE TONS TO DO (and we're wasting Jim's time if we're not there)!!!
When we go, we need to take:
-The chassis and arm (if programming is ok with this...if not, maybe they can follow)
-A battery (so we can weld a mount onto the chassis)
-Notebooks
-That bag with safety glasses and that 1.5' piece of pvc
-and probably other stuff, too...
Ramping it up...
oh dang. i just lost my post because my internet hung. here's a quick version of it.
main ramps = DONE!
secondary ramps = started! aluminum sheet surface cut to correct size and shape.
to do tomorrow (sounds like lots to easy stuff-but will take time!!! only a week left!!):
-draw grid on ramp material and mark points with the punch (borrowed from ideo. don't lose it)
-arm: determine desired length and angle of gripper
-bumpers
-signage--read the rules
-pvc flag holder
-joystick board--place to put joysticks, oi...
-think about hinges/dampers for ramps
other stuff:
-crate? kersten, are you in touch with mr. reichling? HOW IS THE ROBOT GETTING SECURED INSIDE?
-electronics cover
-battery mount (orientation? placement?)
-cross bracing on tower of power
other other:
-chairman's?
main ramps = DONE!
secondary ramps = started! aluminum sheet surface cut to correct size and shape.
to do tomorrow (sounds like lots to easy stuff-but will take time!!! only a week left!!):
-draw grid on ramp material and mark points with the punch (borrowed from ideo. don't lose it)
-arm: determine desired length and angle of gripper
-bumpers
-signage--read the rules
-pvc flag holder
-joystick board--place to put joysticks, oi...
-think about hinges/dampers for ramps
other stuff:
-crate? kersten, are you in touch with mr. reichling? HOW IS THE ROBOT GETTING SECURED INSIDE?
-electronics cover
-battery mount (orientation? placement?)
-cross bracing on tower of power
other other:
-chairman's?
Sunday, February 11, 2007
Sunday, Jan 7
A lot of punching went on today.
First, we all arrived at Castilleja and worked on some stuff (like moving tables, sending emails, and making bumpers) and then Monta Vista arrived to use the rack and then Allie and Anne worked on the crate and Jimmy woke up so we went to IDEO, but not before Bud dropped by and we all had a chat, which was great because Bud is awesome. And then he came to IDEO with us and stuck around for a while, and then programming came to IDEO, so there was a big programming/electronics and ramp design party in the shop, and we punched a lot of stuff and the upshot of all of that is that we have a main ramp that holds more than we need it to and that weighs 7.4 lbs! YES!
Weight check:
-4 ramp frames = 15 lbs
-chassis and arm and tower = 65 lbs
-electronics board = really light because thy remounted stuff on a sort of corrugated plastic sheet.
Also, we need an optical potentiometer.
Also also we need to put together (that is, clamp, drill, rivet, punch) the rest of the ramps, and then we need to support them, and then do hinges, and then dampers. So keep cracking, guys! Keep up the good work for the next 9 days (AAAAAAAHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHH!!!!!!!!!!!!!!!!!!)
First, we all arrived at Castilleja and worked on some stuff (like moving tables, sending emails, and making bumpers) and then Monta Vista arrived to use the rack and then Allie and Anne worked on the crate and Jimmy woke up so we went to IDEO, but not before Bud dropped by and we all had a chat, which was great because Bud is awesome. And then he came to IDEO with us and stuck around for a while, and then programming came to IDEO, so there was a big programming/electronics and ramp design party in the shop, and we punched a lot of stuff and the upshot of all of that is that we have a main ramp that holds more than we need it to and that weighs 7.4 lbs! YES!
Weight check:
-4 ramp frames = 15 lbs
-chassis and arm and tower = 65 lbs
-electronics board = really light because thy remounted stuff on a sort of corrugated plastic sheet.
Also, we need an optical potentiometer.
Also also we need to put together (that is, clamp, drill, rivet, punch) the rest of the ramps, and then we need to support them, and then do hinges, and then dampers. So keep cracking, guys! Keep up the good work for the next 9 days (AAAAAAAHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHH!!!!!!!!!!!!!!!!!!)
Tuesday, February 06, 2007
monday
Today we wrote letters for a while (which are due TODAY, btw) and then, once we figured out our transportation, headed over to IDEO. Jim has machined us some wonderful stuff, like transmission mounts and the motor mount for Chrissy's arm. We also had him drill holes in the new chassis and we can put wheels and (almost) transmissions on the actual robot. We still don't know what ramp material we're going to use. We still (consequently) don't know whether we'll use a flipper (Free Willy) or some latch and cable device to keep the ramps in (does anyone else think that latches and cables might be a bit iffy if we get run into?). We still might end up buying the Andymark transmissions. We need to go to Alan Steel to buy some stuff (there's a list somewhere... Julia?). If anyone knows anything about where to buy structural bamboo, post a comment here or talk to me or Julia or Chrissy about it.
Thanks to Ms Doerr for the sushi.
Good work on the crate, freshman.
Thanks to Ms Doerr for the sushi.
Good work on the crate, freshman.
Saturday, February 03, 2007
Saturday
Today we:
-worked on the crate with our wonderful parent volunteer, Mr Reichling. It's now at the painting stage, and we should be finished very soon (which is good, because the robot needs to ship very soon).
-worked on the whole ramp system
-sent Kersten to Ace and IDEO for hinges, allen keys, and advice
-skyped emily
-ate lunch
-drank tea
-made a mess/ work in progress
-cleaned it up
-tested the now complete (if somewhat flawed in the hinge and damper category) ramp system to see that it (mostly) WORKS! So that was cool. It looks like all our effort to design it has worked out.
So now we need to:
-see what sort of surface we want on these ramps
-see if we want to change the ramp release mechanism (cable and latches?)
-go to allen steel for possible ramp material and the aluminum axle rod for the arm
-figure out what we're going to do about our transmissions. The options are to buy the Andy mark ones, use last years' (which may not be legal, so we need to see what the rule book says about that), see what the authorities are going to do about the ones from this year, or ask Jim if maybe he can help us modify them
-go to IDEO monday at 5:30 to talk stuff over with Jim
-WRITE OUR LETTERS
-build the robot and win regionals and nationals
so get to work, everybody! (and if that isn't motivation enough, talk to Julia and see what phrase she uses)
-worked on the crate with our wonderful parent volunteer, Mr Reichling. It's now at the painting stage, and we should be finished very soon (which is good, because the robot needs to ship very soon).
-worked on the whole ramp system
-sent Kersten to Ace and IDEO for hinges, allen keys, and advice
-skyped emily
-ate lunch
-drank tea
-made a mess/ work in progress
-cleaned it up
-tested the now complete (if somewhat flawed in the hinge and damper category) ramp system to see that it (mostly) WORKS! So that was cool. It looks like all our effort to design it has worked out.
So now we need to:
-see what sort of surface we want on these ramps
-see if we want to change the ramp release mechanism (cable and latches?)
-go to allen steel for possible ramp material and the aluminum axle rod for the arm
-figure out what we're going to do about our transmissions. The options are to buy the Andy mark ones, use last years' (which may not be legal, so we need to see what the rule book says about that), see what the authorities are going to do about the ones from this year, or ask Jim if maybe he can help us modify them
-go to IDEO monday at 5:30 to talk stuff over with Jim
-WRITE OUR LETTERS
-build the robot and win regionals and nationals
so get to work, everybody! (and if that isn't motivation enough, talk to Julia and see what phrase she uses)
Mostly ramps
The coil springs definitely seem to be working at the joint b/w main and secondary on our 80-20 ramp! (note: depending on the final surface material for our ramp, mounting them may be a little more challenging, but doable, of course).
The dampers are also showing promise; we used some L-brackets to mount them onto our 80-20 chassis and ramp and slowed down the 20 lb ramp significantly (not necessarily enough, but the real ramp won't be 20 lb...). Unfortunately, even with a less significant crash into the floor, the end piece on one of the dampers (with a ball and socket joint) broke. It's still usuable, but this is a problem we have to address.
The mesh seems to be strong enough to hold a robot, provided there is no hole cut out for the ramp release mechanism. If we go with the mesh (possibly two layers of it?), we'll have to:
1) rework the release mechanism (not completely, but I don't think what we currently have will work since it requires a hole...)
2) consider the sag-factor: will the robot stay above 12"? will sag prevent robots from being able to climb up the secondary ramp and onto the main part of the ramp?
To Do:
•Sat Morning--PLACE A MCMASTER ORDER SO IT'LL ARRIVE MONDAY
•plot out location of transmissions and electronics board (keeping in mind the arm has to fit "inside the chassis" at the beginning of each round, before it flips "open" to be in front of the robot)
•consider whether our arm/gripper is going to work with/fit over the black flexible-ish tube on the spider arms
•calc exact distance on either side of robot in home zone when ramps are deployed, and possibly get a max secondary ramp length based on this number
•continue work on ramps: SUPPORTS (either buy hinges from mcmaster or pick some up from ACE; make supports from wood?; cable...possibly buy for crimps for when we need them eventually)
•buy more transmission sprockets if we decided to run two loops of chain from each transmission (one to the middle wheel, and one to the back wheel). (but we don't need any more chain! just possibly some master and half links)
•SKYPE EM AT THREE!
•Mr. Reichling will be here to help construct crate! maybe paint it, too....
see ya! (and don't forget your HOMEWORK :D )
The dampers are also showing promise; we used some L-brackets to mount them onto our 80-20 chassis and ramp and slowed down the 20 lb ramp significantly (not necessarily enough, but the real ramp won't be 20 lb...). Unfortunately, even with a less significant crash into the floor, the end piece on one of the dampers (with a ball and socket joint) broke. It's still usuable, but this is a problem we have to address.
The mesh seems to be strong enough to hold a robot, provided there is no hole cut out for the ramp release mechanism. If we go with the mesh (possibly two layers of it?), we'll have to:
1) rework the release mechanism (not completely, but I don't think what we currently have will work since it requires a hole...)
2) consider the sag-factor: will the robot stay above 12"? will sag prevent robots from being able to climb up the secondary ramp and onto the main part of the ramp?
To Do:
•Sat Morning--PLACE A MCMASTER ORDER SO IT'LL ARRIVE MONDAY
•plot out location of transmissions and electronics board (keeping in mind the arm has to fit "inside the chassis" at the beginning of each round, before it flips "open" to be in front of the robot)
•consider whether our arm/gripper is going to work with/fit over the black flexible-ish tube on the spider arms
•calc exact distance on either side of robot in home zone when ramps are deployed, and possibly get a max secondary ramp length based on this number
•continue work on ramps: SUPPORTS (either buy hinges from mcmaster or pick some up from ACE; make supports from wood?; cable...possibly buy for crimps for when we need them eventually)
•buy more transmission sprockets if we decided to run two loops of chain from each transmission (one to the middle wheel, and one to the back wheel). (but we don't need any more chain! just possibly some master and half links)
•SKYPE EM AT THREE!
•Mr. Reichling will be here to help construct crate! maybe paint it, too....
see ya! (and don't forget your HOMEWORK :D )
Friday, February 02, 2007
JIm is a welding master
Duh. Ok, we all knew that. Still, he continues to amaze me! Tonight he welded the main platform for one of the ramps. In addition, he welded the two sides of our tower of power, complete with homemade L-brackets that will allow us to adjust the placement of the tower on our chassis. Our real robot is still looking pretty skeleton-like, but it's beginning to take form!!!
In other news, we got our 72 tooth sprocket today. Some funky stuff going on with a couple of teeth, but according to Jim, "the chain doesn't care," so we're ready to proceed on that front. Some folks also worked on prototyping with wire mesh on the ramp. Jim has also suggested a thin sheet of aluminum (for Kersten, preferably one that makes cool sounds).
To buy (this is also in my notebook, which isn't with me, so I may be forgetting something):
ALUMINUM ROD (to replace the steel one we're currently using for arm)-3/4" diameter, I have a part number (mcmaster)
Hinges for Ramp--Kersten and I started working on this, considering what kind we want at each joint on the ramps ("leaves lay flat" hinges, etc.)
Two 1/2" shaft collars (I think we may have some of these, so let's check first)
To find out:
-Do our current coil springs on ramp work without a pin in the spring hinges at that joint (in other words, would the coil springs with springless hinges provide sufficient ramp-unfolding action)?
-What's our status on weight? (the main platform of a ramp that Jim welded for us is 3.8 lb, so we're already at a total of about 40 lb for the welded frames of both ramps, the tower of power w/o the arm, and the chassis frame).
Lastly, DO YOUR ROBOTICS HOMEWORK!!!! IT'S *REALLY* IMPORTANT. We need a letter from EVERY one of you!
Here is the link to the specifics of the assignment, again, just in case:
http://www.usfirst.org/community/frc/content.aspx?id=4066
thanks!
In other news, we got our 72 tooth sprocket today. Some funky stuff going on with a couple of teeth, but according to Jim, "the chain doesn't care," so we're ready to proceed on that front. Some folks also worked on prototyping with wire mesh on the ramp. Jim has also suggested a thin sheet of aluminum (for Kersten, preferably one that makes cool sounds).
To buy (this is also in my notebook, which isn't with me, so I may be forgetting something):
ALUMINUM ROD (to replace the steel one we're currently using for arm)-3/4" diameter, I have a part number (mcmaster)
Hinges for Ramp--Kersten and I started working on this, considering what kind we want at each joint on the ramps ("leaves lay flat" hinges, etc.)
Two 1/2" shaft collars (I think we may have some of these, so let's check first)
To find out:
-Do our current coil springs on ramp work without a pin in the spring hinges at that joint (in other words, would the coil springs with springless hinges provide sufficient ramp-unfolding action)?
-What's our status on weight? (the main platform of a ramp that Jim welded for us is 3.8 lb, so we're already at a total of about 40 lb for the welded frames of both ramps, the tower of power w/o the arm, and the chassis frame).
Lastly, DO YOUR ROBOTICS HOMEWORK!!!! IT'S *REALLY* IMPORTANT. We need a letter from EVERY one of you!
Here is the link to the specifics of the assignment, again, just in case:
http://www.usfirst.org/community/frc/content.aspx?id=4066
thanks!
Wednesday, January 31, 2007
Wednesday 31.01.07
today:
started off a bit slow, but then we took the stock over to IDEO to weld!!
yay for Jimmy!
so by the end of the night, we have a FRAME! that's right. a frame...w00t!
meanwhile back at casti, the freshmen designed and put together a bom for bumpers. a much needed and neccesary task :)
Tomorrow:
mounting transmissions from Rosie onto 80-20 prototype so programming can run code on a robot whose transmissions aren't likely to lock up at any moment....yikes.
more welding-specifically ramps, maybe arm structure
drilling holes in chassis frame--so we need to take SPROCKETS AND CHAIN TO IDEO
look to buy FLANGE BEARINGS TO KEEP TRANSMISSION SHAFT FROM TORQUING
prototype with ramp material that ed brought over tonight (metal mesh)
use 80-20 ramp to test with extension DAMPERS and COIL SPRINGS
finalize bumper design--keep it up, freshmen!
HOMEWORK!
EVERY PERSON ON THE ENTIRE ROBOTICS TEAM MUST WRITE A LETTER TO A CONGRESSPERSON, INVITING THEM TO A REGIONAL AND TALKING ABOUT HOW GREAT FIRST IS (cause it's hella rockin').
See http://www.usfirst.org/community/frc/content.aspx?id=4066 for specific details on what you should include.
PLEASE submit your letter to Chrissy, Hannah, or Julia by SATURDAY AFTERNOON, and we'll send it off for you. If you don't care who you write to, just leave that part blank and we'll fill it in or get back to you.
See you all tomorrow--remeber to be there on time (3:30) so that we can get started :) LOTS to do before ship date!!!
thanks!
over and out
started off a bit slow, but then we took the stock over to IDEO to weld!!
yay for Jimmy!
so by the end of the night, we have a FRAME! that's right. a frame...w00t!
meanwhile back at casti, the freshmen designed and put together a bom for bumpers. a much needed and neccesary task :)
Tomorrow:
mounting transmissions from Rosie onto 80-20 prototype so programming can run code on a robot whose transmissions aren't likely to lock up at any moment....yikes.
more welding-specifically ramps, maybe arm structure
drilling holes in chassis frame--so we need to take SPROCKETS AND CHAIN TO IDEO
look to buy FLANGE BEARINGS TO KEEP TRANSMISSION SHAFT FROM TORQUING
prototype with ramp material that ed brought over tonight (metal mesh)
use 80-20 ramp to test with extension DAMPERS and COIL SPRINGS
finalize bumper design--keep it up, freshmen!
HOMEWORK!
EVERY PERSON ON THE ENTIRE ROBOTICS TEAM MUST WRITE A LETTER TO A CONGRESSPERSON, INVITING THEM TO A REGIONAL AND TALKING ABOUT HOW GREAT FIRST IS (cause it's hella rockin').
See http://www.usfirst.org/community/frc/content.aspx?id=4066 for specific details on what you should include.
PLEASE submit your letter to Chrissy, Hannah, or Julia by SATURDAY AFTERNOON, and we'll send it off for you. If you don't care who you write to, just leave that part blank and we'll fill it in or get back to you.
See you all tomorrow--remeber to be there on time (3:30) so that we can get started :) LOTS to do before ship date!!!
thanks!
over and out
Monday, January 29, 2007
Monday 29.01.07 (a lesson in floss)
quick recap...
ALLEN STEEL ROCKS MY SOCKS!
went and got 33 pounds of aluminum today. quite fun. w00t! saw 114 there. quite exciting. the allen is doing well...and so is the horizontal band saw :)
more designing stuff
the ramps are ramping up (haha) and we found some SWEET springs that do the job of the hinges very neatly...though at the moment they are secured rather precariously...but we covered them up and put a nice "do not touch this without safety glasses or else" sign on it so we are good to go.
as for the arm, it is also looking good. more finalizing of design, so basically all we need to do now is put it together. YAYNESS!
tomorrow:IDEO at 5.30. we will be welding a frame, welding an arm, drilling some stuff, laithing some other stuff, and doing generally exciting things.
(vague stuff to be exact)
get EXCITED! the ACTUAL robot is coming together!!!!
over and out
ALLEN STEEL ROCKS MY SOCKS!
went and got 33 pounds of aluminum today. quite fun. w00t! saw 114 there. quite exciting. the allen is doing well...and so is the horizontal band saw :)
more designing stuff
the ramps are ramping up (haha) and we found some SWEET springs that do the job of the hinges very neatly...though at the moment they are secured rather precariously...but we covered them up and put a nice "do not touch this without safety glasses or else" sign on it so we are good to go.
as for the arm, it is also looking good. more finalizing of design, so basically all we need to do now is put it together. YAYNESS!
tomorrow:IDEO at 5.30. we will be welding a frame, welding an arm, drilling some stuff, laithing some other stuff, and doing generally exciting things.
(vague stuff to be exact)
get EXCITED! the ACTUAL robot is coming together!!!!
over and out
Sunday, January 28, 2007
We Have Hit the Halfway Point
Yes, it's true. Something like 21 or 22 more days to go. Eek!
Firstly, thanks to all the freshmen who show up consistently (even for the supposedly nonexistant Sunday meetings) and are ready to help (or be patient when we don't have much for you guys to do). Today was one those days. But while not much progress was made on the building front, Chrissy, Kersten, and I were able to reassess our design and determine the mechanisms that still need figuring out for our final robot.
Here are the lists we came up with.
Little tasks to do:
- Drill new holes/fix existing holes in transmission mounting plate so they actually line up with the holes in the transmission!
- Make pillowblock bearings similar to the ones we have on Rosie (the black boxes--we should remove these tomorrow so we can show Jim). I (Julia) have the new dimensions for these.
- Hollow out the 3/4" diameter arm shaft that weighs a ton (it doesn't need to be completely indestructable)
- Weld the other end piece of the ramp release flipper to a shaft collar so that's it's removable
- Weld a battery mount
- Make Delrin wheels or slide for the end of the ramp so it doesn't snag on the carpet
- Drill holes in gears in transmission adapter for weight loss (we'll hold off on this until we're mounting them on the real chassis)
- Maybe mount electronics board (I said electronics could do this, but we should probably just ask them what they want and maybe drill holes based on where we want them on the chassis)
- Make a cover for the electroncis board or perhaps just cover the front face of the chassis with a sheet of polycarbonate
- Signage (1700, sponsers, too!)
- Bumpers (maybe later...)
To figure out:
- We'd like to make the secondary ramp longer so the angle robots have to drive up isn't so steep (30° is last year's angle and it wasn't ideal), but a big issue is weight! We weighed our prototype (which is missing a fair bit of parts) and it's about 100lb. YIKES!
- Ramp material: how does poly carb weight compare to expanded metal? (we're already planning to build a frame with bracing using aluminum extrusion)
-Where are we going to have spring hinges, regular hinges, dampers for our ramp? Are there dampers that prevent both extremely fast extension and compression? How are we going to position and deploy the TWO supports for each ramp (K, C, and I are thinking just cable to both the main ramp and the secondary ramp that'll force it into one position)? Ideally we'll make progress on this MONDAY AFTERNOON/EVENING AND BE ABLE TO PLACE AN ORDER!! :)
-ASK JIM/ED ABOUT TORSIONAL SPRING DAMPERS (for ramp) (and post pics of sketches for em)
- Make any necessary changes to prototype chassis dimensions and then have Jim weld it for us (as well as the tower of power and the ramp frames)
What we figured out:
-The transmissions mounted generally as they are on the prototype will work on the actual robot (so we only need one chain around the back two wheels--saving weigh, an extra support someone for mounting elsewhere, and messy chain tensioning stuff)
- We don't want to have two-level arm-motor gearing. Remember, KISS (keep it simple, stupid)! A 10 tooth sprocket on the motor and a sprocket with about 70 teeth up on the arm shaft should do the trick, though it'd be good to talk this through with Jim and/or Ed once more.
Tomorrow let's set some deadlines and then jump right in. Kersten is gonna start us out by picking up a whole bunch of aluminum extrusion from Alan Steel tomorrow. How cool would it be to finish our robot 2 weeks before ship date?!
Right, so as I see it, these are crucial things to focus on tomorrow (I may have missed something, so read the other lists, too!):
- The ramp: joints, materials, springs, dampers, cable, height (based on the height of the chassis) ,etc. Ed will be here, so we'll be able to get his input in this area. PLACE AN ORDER!
- Also ORDER a sprocket for the IFI arm
- Contact Jim about a session on Tuesday (and others this week, too)
- Along with the ramps, work on the arm. We don't even have this prototype yet, so let's make sure this is a priority!
--question I just had: can our current design hold a keeper?
See you all tomorrow!
Firstly, thanks to all the freshmen who show up consistently (even for the supposedly nonexistant Sunday meetings) and are ready to help (or be patient when we don't have much for you guys to do). Today was one those days. But while not much progress was made on the building front, Chrissy, Kersten, and I were able to reassess our design and determine the mechanisms that still need figuring out for our final robot.
Here are the lists we came up with.
Little tasks to do:
- Drill new holes/fix existing holes in transmission mounting plate so they actually line up with the holes in the transmission!
- Make pillowblock bearings similar to the ones we have on Rosie (the black boxes--we should remove these tomorrow so we can show Jim). I (Julia) have the new dimensions for these.
- Hollow out the 3/4" diameter arm shaft that weighs a ton (it doesn't need to be completely indestructable)
- Weld the other end piece of the ramp release flipper to a shaft collar so that's it's removable
- Weld a battery mount
- Make Delrin wheels or slide for the end of the ramp so it doesn't snag on the carpet
- Drill holes in gears in transmission adapter for weight loss (we'll hold off on this until we're mounting them on the real chassis)
- Maybe mount electronics board (I said electronics could do this, but we should probably just ask them what they want and maybe drill holes based on where we want them on the chassis)
- Make a cover for the electroncis board or perhaps just cover the front face of the chassis with a sheet of polycarbonate
- Signage (1700, sponsers, too!)
- Bumpers (maybe later...)
To figure out:
- We'd like to make the secondary ramp longer so the angle robots have to drive up isn't so steep (30° is last year's angle and it wasn't ideal), but a big issue is weight! We weighed our prototype (which is missing a fair bit of parts) and it's about 100lb. YIKES!
- Ramp material: how does poly carb weight compare to expanded metal? (we're already planning to build a frame with bracing using aluminum extrusion)
-Where are we going to have spring hinges, regular hinges, dampers for our ramp? Are there dampers that prevent both extremely fast extension and compression? How are we going to position and deploy the TWO supports for each ramp (K, C, and I are thinking just cable to both the main ramp and the secondary ramp that'll force it into one position)? Ideally we'll make progress on this MONDAY AFTERNOON/EVENING AND BE ABLE TO PLACE AN ORDER!! :)
-ASK JIM/ED ABOUT TORSIONAL SPRING DAMPERS (for ramp) (and post pics of sketches for em)
- Make any necessary changes to prototype chassis dimensions and then have Jim weld it for us (as well as the tower of power and the ramp frames)
What we figured out:
-The transmissions mounted generally as they are on the prototype will work on the actual robot (so we only need one chain around the back two wheels--saving weigh, an extra support someone for mounting elsewhere, and messy chain tensioning stuff)
- We don't want to have two-level arm-motor gearing. Remember, KISS (keep it simple, stupid)! A 10 tooth sprocket on the motor and a sprocket with about 70 teeth up on the arm shaft should do the trick, though it'd be good to talk this through with Jim and/or Ed once more.
Tomorrow let's set some deadlines and then jump right in. Kersten is gonna start us out by picking up a whole bunch of aluminum extrusion from Alan Steel tomorrow. How cool would it be to finish our robot 2 weeks before ship date?!
Right, so as I see it, these are crucial things to focus on tomorrow (I may have missed something, so read the other lists, too!):
- The ramp: joints, materials, springs, dampers, cable, height (based on the height of the chassis) ,etc. Ed will be here, so we'll be able to get his input in this area. PLACE AN ORDER!
- Also ORDER a sprocket for the IFI arm
- Contact Jim about a session on Tuesday (and others this week, too)
- Along with the ramps, work on the arm. We don't even have this prototype yet, so let's make sure this is a priority!
--question I just had: can our current design hold a keeper?
See you all tomorrow!
Saturday, January 27, 2007
Hurrah!
Lots of progress today!
The prototype chassis is ready for some code and an electronics board! We finished mounting the transmissions and putting chain on and also mounted the motor for the ramp release mechanism! Kersten and I also rigged up a battery mount for the prototype chassis made out of good old wood and angle iron :)
Thanks again to Jim for the hollowed-out Delrin "chain tensioning" rods and for taking Kersten, Chrissy, Anne, and Melissa to the shop to help us:
-Cut chain to length
-Get some polycarbonate for the electronics board (if any of you programming/electronics people are reading this, all you have to do is mount your stuff onto this sheet, which has already been cut to size)
-Mill a slot for a key in the arm shaft
-Drill holes for set screws in the transmission sprockets
-And probably other things I'm not aware of since I didn't go
Meanwhile, Nandini learned about putting chain together with half-links and master-links. yay!
See you all tomorrow at 11:00 (get ready to work on the arm and the crate)!
ps--PLEASE reply to my email re Portland by tomorrow (Sunday) afternoon if you haven't already!
The prototype chassis is ready for some code and an electronics board! We finished mounting the transmissions and putting chain on and also mounted the motor for the ramp release mechanism! Kersten and I also rigged up a battery mount for the prototype chassis made out of good old wood and angle iron :)
Thanks again to Jim for the hollowed-out Delrin "chain tensioning" rods and for taking Kersten, Chrissy, Anne, and Melissa to the shop to help us:
-Cut chain to length
-Get some polycarbonate for the electronics board (if any of you programming/electronics people are reading this, all you have to do is mount your stuff onto this sheet, which has already been cut to size)
-Mill a slot for a key in the arm shaft
-Drill holes for set screws in the transmission sprockets
-And probably other things I'm not aware of since I didn't go
Meanwhile, Nandini learned about putting chain together with half-links and master-links. yay!
See you all tomorrow at 11:00 (get ready to work on the arm and the crate)!
ps--PLEASE reply to my email re Portland by tomorrow (Sunday) afternoon if you haven't already!
Thursday, January 25, 2007
Thursday 25.01.2007
hey hey hey!
while the programming team had commandeered the transmissions, we worked on designing a motor mount for the arm mechanism (there are some very nice drawings in GENERAL 2), as well as putting together the new wheel and putting it on!
Sent j-rock on an ace run for washers and shaft collars (we never seem to have enough...hmmm...who has been eating the shaft collars???)
so now we have washers so the shaft collars are not as hard to install on the wheels.
made a list of very important measurements. arms stuff. chassis stuff. other stuff.
and now we are about to mount the transmissions on the robot! yay for chain!
Doug, Richard, and Beth are working on the RACK! w00t! go them!
GOALS: end of the week (saturday at the latest) have a running prototype. yay!
REMINDER! PLEASE COME TO TOMORROW'S BUILD-PROGRAMMING-MENTOR MEETING AT 5.30. WE WILL BE DISCUSSING THE REST OF THE SEASON AND WHAT WE NEED FROM EACH OTHER TO ACCOMPLISH OUR GOAL!!!
THANKS.
over and out.
while the programming team had commandeered the transmissions, we worked on designing a motor mount for the arm mechanism (there are some very nice drawings in GENERAL 2), as well as putting together the new wheel and putting it on!
Sent j-rock on an ace run for washers and shaft collars (we never seem to have enough...hmmm...who has been eating the shaft collars???)
so now we have washers so the shaft collars are not as hard to install on the wheels.
made a list of very important measurements. arms stuff. chassis stuff. other stuff.
and now we are about to mount the transmissions on the robot! yay for chain!
Doug, Richard, and Beth are working on the RACK! w00t! go them!
GOALS: end of the week (saturday at the latest) have a running prototype. yay!
REMINDER! PLEASE COME TO TOMORROW'S BUILD-PROGRAMMING-MENTOR MEETING AT 5.30. WE WILL BE DISCUSSING THE REST OF THE SEASON AND WHAT WE NEED FROM EACH OTHER TO ACCOMPLISH OUR GOAL!!!
THANKS.
over and out.
Monday, January 22, 2007
Monday 22.01.2007
welcome to the third week!
got the new transmission adapter in the mail today, along with some 80-20 and some other cool stuff. w00t!
we started by cleaning the project room (a much needed action)
we can actually walk in in now without tripping over things (mostly) and melissa organized boxes and pens while kersten, nandini, and anne worked on inventoring the shipment as well as designing more ramp stuff.
then it was off to IDEO for a transmission-putting-together-taking-off-random-stuff-from-the CIM-motor-delrin-cutting-shaft-widening-laithing-filing extravaganza with jimmy (thank you!)
after getting back, and eating (wonderful dinner supplied by the macewan family), we worked on ramp stuff with ed, while doug and mr. crone worked on the rack downstairs.
currently working on ramp. more later.
AS A REMINDER, MEETING TIMES HAVE BEEN EXTENDED FROM 3.30 TO 8PM. PLEASE BE HERE. WE ARE IN THE FINAL STAGES OF DESIGN AND BUILD SO IF YOU WANT TO BE A PART OF THE ACTION, BE HERE. plus it's fun... :) yay!
over and out.
-chrissy
got the new transmission adapter in the mail today, along with some 80-20 and some other cool stuff. w00t!
we started by cleaning the project room (a much needed action)
we can actually walk in in now without tripping over things (mostly) and melissa organized boxes and pens while kersten, nandini, and anne worked on inventoring the shipment as well as designing more ramp stuff.
then it was off to IDEO for a transmission-putting-together-taking-off-random-stuff-from-the CIM-motor-delrin-cutting-shaft-widening-laithing-filing extravaganza with jimmy (thank you!)
after getting back, and eating (wonderful dinner supplied by the macewan family), we worked on ramp stuff with ed, while doug and mr. crone worked on the rack downstairs.
currently working on ramp. more later.
AS A REMINDER, MEETING TIMES HAVE BEEN EXTENDED FROM 3.30 TO 8PM. PLEASE BE HERE. WE ARE IN THE FINAL STAGES OF DESIGN AND BUILD SO IF YOU WANT TO BE A PART OF THE ACTION, BE HERE. plus it's fun... :) yay!
over and out.
-chrissy
Sunday, January 21, 2007
Sunday 21.01.07
ok so today...
jimmy came over to casti and talked about arm stuff (mostly sprockets and gearing down that monster of a CIM motor) and ramp stuff...
we tested the ramp stuff...and the hinges aren't really working, so we are going over to ideo tomorrow with a to-do list and a bunch of stuff to check out! yay!
thanks to trae for working with the programmers today! they worked a bunch with the electronics board that emily made.
speaking of emily, we also skyped her around 3. she says good job and keep up the good work!
Doug and a bunch of the parents were working hard on the rack...sawdust flying everywhere! the crate is half-finished and the rack is all ready to put together! yay!
see you all tomorrow at the new meeting time, 3:30
be there or be not there (and tell us)
jimmy came over to casti and talked about arm stuff (mostly sprockets and gearing down that monster of a CIM motor) and ramp stuff...
we tested the ramp stuff...and the hinges aren't really working, so we are going over to ideo tomorrow with a to-do list and a bunch of stuff to check out! yay!
thanks to trae for working with the programmers today! they worked a bunch with the electronics board that emily made.
speaking of emily, we also skyped her around 3. she says good job and keep up the good work!
Doug and a bunch of the parents were working hard on the rack...sawdust flying everywhere! the crate is half-finished and the rack is all ready to put together! yay!
see you all tomorrow at the new meeting time, 3:30
be there or be not there (and tell us)
Saturday, January 20, 2007
Groups!
Hey everyone!
Today we worked more on everything. We split into teams, so Chrissy and Nandini worked on the arm prototype and then the batteries, Julia and Anne worked on the 80-20 version of the ramp prototype, Kersten and Melissa worked with Doug on the flipper things to hold in the new ramps, and the freshman all worked on the crate or rack at some point during the day.
So the ramp people still need to attach the ramp and figure out how the springs should work, the arm people need to see what sprocket they want to use, and the flipper people are mainly waiting on the order to arrive so they can start work.
And the crate is doing well- the back half is attached to the base.
Meeting tomorrow is from 11 to sometime before 6 (probably around 3 or 4).
Today we worked more on everything. We split into teams, so Chrissy and Nandini worked on the arm prototype and then the batteries, Julia and Anne worked on the 80-20 version of the ramp prototype, Kersten and Melissa worked with Doug on the flipper things to hold in the new ramps, and the freshman all worked on the crate or rack at some point during the day.
So the ramp people still need to attach the ramp and figure out how the springs should work, the arm people need to see what sprocket they want to use, and the flipper people are mainly waiting on the order to arrive so they can start work.
And the crate is doing well- the back half is attached to the base.
Meeting tomorrow is from 11 to sometime before 6 (probably around 3 or 4).
Thursday, January 18, 2007
Do it.
Chrissy and Julia made a run to Ace Hardware during period 6 today and bought door hinges, wheel axle/bolts (6") and nylon nuts to go along with them, steel (?) cable, washers, and maybe a few other things... When Ed came, he brought more steel cable, crimps for the cable, and eye-bolts (I don't actually know what these are called).
The proto chassis now has wheels and a ramp (pictures coming)! The ramp is made out of foamcore mounted on spring hinges and has a damper/support-component, too. Watch the magic unfold...and the foam core break apart. It's not a big deal, but it means we've entered the next stage in the ramp prototyping process: creating an 80-20 frame for the ramp. Not only will this give us a much more realistic sense of weight, it also will make for a much more durable product.
There's also a lot to be done in every other area of the robot--the arm/tower and chassis. Ed helped us break these to-dos into separate tasks with deadlines (see the white board), and we'll each be focusing on two of these for the next while.
And, finally, Kersten learned the importance of "saftey".
The proto chassis now has wheels and a ramp (pictures coming)! The ramp is made out of foamcore mounted on spring hinges and has a damper/support-component, too. Watch the magic unfold...and the foam core break apart. It's not a big deal, but it means we've entered the next stage in the ramp prototyping process: creating an 80-20 frame for the ramp. Not only will this give us a much more realistic sense of weight, it also will make for a much more durable product.
There's also a lot to be done in every other area of the robot--the arm/tower and chassis. Ed helped us break these to-dos into separate tasks with deadlines (see the white board), and we'll each be focusing on two of these for the next while.
And, finally, Kersten learned the importance of "saftey".
Wednesday, January 17, 2007
Oh man (good stuff and not so good)
Accomplishments:
-holes for wheel axles and delrin rod chain tensioners drilled through bottom 80-20 chassis rails by jim
-IFI wheel and treads purchased
-2 banebot transmission adaptors purchased
-chassis and arm 80-20 structures completed (almost--see pictures by following "Build Team Photos" link and selecting Prototypes album)
-some foam core cut for ramps
Discoveries:
-Something went weird with our predicted axle lengths. The ones we've used in past years weren't long enough, so Chrissy and I are making a trip to Ace tomorrow during p. 6 to buy some (and other ramp, etc. parts, too)
-L brackets are too long for the planned 3.5" between the chassis rails around the wheels (L-brackets are 2"-see pictures). We used L-brackets cut down to 1x2 holes, but only had 3, so we need to cut another tomorrow.
To do/buy/figure out:
-Do we have enough chain for our chassis? (When we hand it over to programming, it should have motors and chain, so we can have a working chassis)
-everything ramp related
-washers so the spring hinges aren't floating around on bolts prevented from screwing into nut plates further because they're hitting the 80-20 on the other side of the nut plate
-cut a hole off an L-bracket for the chassis
-(grippers)
-Comment if you think of anything else that needs to be done soon!
Announcements:
-New meeting times (see side bar)
-We're meeting 3-4 on Friday, and on Saturday (10-4) AND Sunday (starting 11)
Bad news:
-um, let's just say everyone should read the game manual (but don't freak out, please)
-get ready to do some brainstorming...
on that note, see you tomorrow and get ready for a productive meeting :)
-holes for wheel axles and delrin rod chain tensioners drilled through bottom 80-20 chassis rails by jim
-IFI wheel and treads purchased
-2 banebot transmission adaptors purchased
-chassis and arm 80-20 structures completed (almost--see pictures by following "Build Team Photos" link and selecting Prototypes album)
-some foam core cut for ramps
Discoveries:
-Something went weird with our predicted axle lengths. The ones we've used in past years weren't long enough, so Chrissy and I are making a trip to Ace tomorrow during p. 6 to buy some (and other ramp, etc. parts, too)
-L brackets are too long for the planned 3.5" between the chassis rails around the wheels (L-brackets are 2"-see pictures). We used L-brackets cut down to 1x2 holes, but only had 3, so we need to cut another tomorrow.
To do/buy/figure out:
-Do we have enough chain for our chassis? (When we hand it over to programming, it should have motors and chain, so we can have a working chassis)
-everything ramp related
-washers so the spring hinges aren't floating around on bolts prevented from screwing into nut plates further because they're hitting the 80-20 on the other side of the nut plate
-cut a hole off an L-bracket for the chassis
-(grippers)
-Comment if you think of anything else that needs to be done soon!
Announcements:
-New meeting times (see side bar)
-We're meeting 3-4 on Friday, and on Saturday (10-4) AND Sunday (starting 11)
Bad news:
-um, let's just say everyone should read the game manual (but don't freak out, please)
-get ready to do some brainstorming...
on that note, see you tomorrow and get ready for a productive meeting :)
Tuesday, January 16, 2007
Building--hurrah
Our order arrived from Mcmaster today! Lots of fun stuff :)
Chrissy and crew piled into a convertible bug with the 8' and 6' long pieces of 80-20 (what a sight) and made a visit to IDEO. Jim cut the 80-20 to length (thanks, Jim!), and the assembling has begun.
Accomplished so far:
-80/20 for arm, tower, and chassis cut to length
-Chassis assembled except for bottom layer (with the wheels, etc)
To do:
-assemble arm/tower
-drill 3/8" holes in pieces of 80/20 for wheel axles (I started drilling 1/4" pilot holes, but stopped when I realized that the shape of 80/20 means that they won't actually be able to function as pilot holes). Plan 2) Make another visit to Jim tomorrow or Thursday to get this holes drilled. If he's unavailable, do it in our shop... Whoever does this, remember that the holes for the middle wheels have to be 1/8" lower.
-assemble bottom of chassis with wheels/axles and put together with the rest of chassis
-tape together sheets of foamcore to make a thicker piece to use as a ramp
Other decisions made/things to purchase:
-We're going to buy the adaptor that allows us to use 2 CIM motors with one transmission box (we have the additional 2 CIM motors already from previous years)
-Buy one 8" dia, 1" wide IFI wheel, but we do NOT need any more sprockets (and we're not going to invest in larger sprockets either to gear down anything--Ed says we'll be ok)
-Buy seven 1" wide wedgetop treads for IFI wheels (fyi, website doesn't work on macs...sheesh)
Last comments:
-WE NEED TO MAKE COPIES OF BLUEPRINTS SO THAT EVEN WHEN SOMEONE AND HER NOTEBOOK IS GONE, WE STILL KNOW HOW TO BUILD OUR ROBOT :) I'll make sure this gets done tomorrow.
-Our Friday meeting is going to be shorter than usual...exact time tbd.
That's all for now. Hope you all don't have too much homework!
ps-Ed was here tonight, if I didn't make that clear. thanks, Ed.
Chrissy and crew piled into a convertible bug with the 8' and 6' long pieces of 80-20 (what a sight) and made a visit to IDEO. Jim cut the 80-20 to length (thanks, Jim!), and the assembling has begun.
Accomplished so far:
-80/20 for arm, tower, and chassis cut to length
-Chassis assembled except for bottom layer (with the wheels, etc)
To do:
-assemble arm/tower
-drill 3/8" holes in pieces of 80/20 for wheel axles (I started drilling 1/4" pilot holes, but stopped when I realized that the shape of 80/20 means that they won't actually be able to function as pilot holes). Plan 2) Make another visit to Jim tomorrow or Thursday to get this holes drilled. If he's unavailable, do it in our shop... Whoever does this, remember that the holes for the middle wheels have to be 1/8" lower.
-assemble bottom of chassis with wheels/axles and put together with the rest of chassis
-tape together sheets of foamcore to make a thicker piece to use as a ramp
Other decisions made/things to purchase:
-We're going to buy the adaptor that allows us to use 2 CIM motors with one transmission box (we have the additional 2 CIM motors already from previous years)
-Buy one 8" dia, 1" wide IFI wheel, but we do NOT need any more sprockets (and we're not going to invest in larger sprockets either to gear down anything--Ed says we'll be ok)
-Buy seven 1" wide wedgetop treads for IFI wheels (fyi, website doesn't work on macs...sheesh)
Last comments:
-WE NEED TO MAKE COPIES OF BLUEPRINTS SO THAT EVEN WHEN SOMEONE AND HER NOTEBOOK IS GONE, WE STILL KNOW HOW TO BUILD OUR ROBOT :) I'll make sure this gets done tomorrow.
-Our Friday meeting is going to be shorter than usual...exact time tbd.
That's all for now. Hope you all don't have too much homework!
ps-Ed was here tonight, if I didn't make that clear. thanks, Ed.
Monday, January 15, 2007
One more day...
Word has it that our order is arriving tomorrow! If it does in fact come, at least a few of us will be making a trip to IDEO (arriving at 5:30) where Jim has agreed to cut it for us.
In the meantime, we've been sending out emails and all that good (but not so interesting) stuff. We also took a look at this year's new transmissions, and we're hoping to use 4 cim motors, 2 per side, to drive our robot. Each gearbox FIRST provided in the KOP only hooks up to one motor, so our two options are:
1) buy 2 adaptors that'll allow us to run one transmission with two CIM motors
2) buy 2 more transmission gearboxes so we have a total of 4 (this poses some mounting issues...)
Ah yes--and thanks to Allie and Nandini for starting in on estimating the weight of our prototype! We're definitely going to need to keep track of this throughout the season!
Please check your email if you haven't recently and respond to my email about travel. I (Julia) need answers from everyone by tomorrow morning at the latest--thanks to those who already replied!
see ya!
In the meantime, we've been sending out emails and all that good (but not so interesting) stuff. We also took a look at this year's new transmissions, and we're hoping to use 4 cim motors, 2 per side, to drive our robot. Each gearbox FIRST provided in the KOP only hooks up to one motor, so our two options are:
1) buy 2 adaptors that'll allow us to run one transmission with two CIM motors
2) buy 2 more transmission gearboxes so we have a total of 4 (this poses some mounting issues...)
Ah yes--and thanks to Allie and Nandini for starting in on estimating the weight of our prototype! We're definitely going to need to keep track of this throughout the season!
Please check your email if you haven't recently and respond to my email about travel. I (Julia) need answers from everyone by tomorrow morning at the latest--thanks to those who already replied!
see ya!
Sunday, January 14, 2007
Stuff ordered
Today we met and ordered the stuff we need to prototype from McMaster. It should be here in a day or two, and then we can start building.
We also skyped Emily, who answered some or our questions about general stuff.
That's about it. See you tomorrow!
We also skyped Emily, who answered some or our questions about general stuff.
That's about it. See you tomorrow!
Saturday, January 13, 2007
Crate and FINAL BoMs
YAY! Our drawings and BoMs for the prototypes are done, we will order the materials tomorrow, and we can finally start building them when the parts arrive this week... only a few days behind schedule.
We also sent an expedition to buy the materials for the new crate, after which Mr Reichling and George Schnurle helped the freshmen with building. If any of you freshmen reading this want to elaborate on that or can say what the current crate situation is, feel free to comment or post.
We'll send out an email later tonight saying when we're meeting tomorrow.
Cheer(io)s!
We also sent an expedition to buy the materials for the new crate, after which Mr Reichling and George Schnurle helped the freshmen with building. If any of you freshmen reading this want to elaborate on that or can say what the current crate situation is, feel free to comment or post.
We'll send out an email later tonight saying when we're meeting tomorrow.
Cheer(io)s!
Friday, January 12, 2007
BoMs, blueprints, prototypes, and mechanisms
Today we worked more on the prototyping process. The design for one of the gripper ideas was finalized, and we managed to actually build a working model. It looks like a nice, simple gripper that could work well for us. The ramp-holding mechanism was ironed out and sort of sketched out (to be completely blueprinted tomorow). Since most of the BoMs are done for the three big prototypes (chassis, arm/tower, and ramps), we started compiling them and figuring out what we already have (esp in the 80-20 dept) so we can send in an order tomorrow.
Ed stopped by and reminded us that our drawings were actually rather insufficient (and so were our design specifics), so then we went and worked on them. We now know how we're going to hinge ramp stuff (like, the alignment and mechanisms for the support and secondary ramp), what the tower will look like (that's been modified), and what our prototype chassis will be (80-20) (it was under some contention earlier).
If you want to know the exciting changes that we made, come to the meeting tomorrow from 10-3!
Also, crate materials shopping will be starting at 11, so hopefully we will have fun with that and have some of the crate finished by the end of the meeting.
Cheers!
Ed stopped by and reminded us that our drawings were actually rather insufficient (and so were our design specifics), so then we went and worked on them. We now know how we're going to hinge ramp stuff (like, the alignment and mechanisms for the support and secondary ramp), what the tower will look like (that's been modified), and what our prototype chassis will be (80-20) (it was under some contention earlier).
If you want to know the exciting changes that we made, come to the meeting tomorrow from 10-3!
Also, crate materials shopping will be starting at 11, so hopefully we will have fun with that and have some of the crate finished by the end of the meeting.
Cheers!
Thursday, January 11, 2007
Blueprints continuing to progress
Today we met with Mr Reichling to talk about our crate. It's looking pretty good and we will go buy stuff and maybe start working on it on Saturday.
After that we worked more on blueprints and BoMs for the arm idea (having nixed (for now) the elevator idea), the ramp idea, and the various grippers. Melissa now knows all we will ever need to know about solenoids, Ida, Anne, and Alecia worked on modifying our 'harpoon' gripper and started a BoM for that, Julia worked on the chassis sketch and BoM, and Nandini and I worked on this ramp thing that we're going to do.
Everybody, try to keep thinking of gripper designs that we can put on the end of our rotating arm. If you're lying awake tonight or eating lunch tomorrow or bored during tomorrow's meeting, try to think of ways to manipulate inner tubes that don't require any motors- we're all for simple, passive devices that don't require as much designing and are more reliable.
That's all for now- see you tomorrow.
After that we worked more on blueprints and BoMs for the arm idea (having nixed (for now) the elevator idea), the ramp idea, and the various grippers. Melissa now knows all we will ever need to know about solenoids, Ida, Anne, and Alecia worked on modifying our 'harpoon' gripper and started a BoM for that, Julia worked on the chassis sketch and BoM, and Nandini and I worked on this ramp thing that we're going to do.
Everybody, try to keep thinking of gripper designs that we can put on the end of our rotating arm. If you're lying awake tonight or eating lunch tomorrow or bored during tomorrow's meeting, try to think of ways to manipulate inner tubes that don't require any motors- we're all for simple, passive devices that don't require as much designing and are more reliable.
That's all for now- see you tomorrow.
Wednesday, January 10, 2007
Blueprints in progress
Today we inventoried the 80-20 parts we already have and made progress on blueprints. In the process of doing so, we decided on the following dimensions:
chassis--
27"x 37" with the top at a height of 12.5" (so this includes wheel radius)
(for the prototype, we'll still use the slightly large welded frame we have and mount an 80-20 frame of the right dimensions on top)
rotating arm "tower of power"--
44" from the top of the chassis to the height at which the sprocket is mounted (near the top of the arm-frame tower). We estimated a sprocket of max diameter 5", so presumably as much as 2.5" will extend beyond this height). This gives us an estimated robot height of 59" (12.5"+44"+2.5").
Don't forget to draw a blueprint (with dimensions and the 3 perspectives we talked about) of one of the grippers we want to prototype (or a variation on a design we've discussed that you think might work well)!
chassis--
27"x 37" with the top at a height of 12.5" (so this includes wheel radius)
(for the prototype, we'll still use the slightly large welded frame we have and mount an 80-20 frame of the right dimensions on top)
rotating arm "tower of power"--
44" from the top of the chassis to the height at which the sprocket is mounted (near the top of the arm-frame tower). We estimated a sprocket of max diameter 5", so presumably as much as 2.5" will extend beyond this height). This gives us an estimated robot height of 59" (12.5"+44"+2.5").
Don't forget to draw a blueprint (with dimensions and the 3 perspectives we talked about) of one of the grippers we want to prototype (or a variation on a design we've discussed that you think might work well)!
Tuesday, January 09, 2007
Before we Prototype...
We now have two major arm designs--rotating arm & elevator-forklift--ideas that we plan to now prototype (if reaching the floor with an elevator-forklift design doesn't become to much of a problem) and grippers to test with those arms. We also have 2 ramp ideas we want to try out.
So, stuff to prototype:
- hi-mounted rotating arm
- elevator/forklift
- grippers to test with above arms
- 2 ramp ideas
Before we prototype, there are some important things to do first:
- Create blueprints (not Kersten-Julia-Chrissy sketches) for the two arm designs with side, front, and top views (dimensions and all that good stuff, too)
- Also make blueprints for the different grippers
- Come up with BoM (Bill of Materials)--stuff we need to build prototypes
- Inventory parts we have (like 80-20 L-brackets, bearings & steel rod for the rotating arm?), so we don't spend $ unnecessarily
- Enlarge our calendar, so that we can coordinate with Prog/Electronics on the same calendar.
Other robot info:
- The length of a rotating arm will be roughly 5' (we have better numbers than this)
- To build our prototype chassis, we're going to use our pre-season welded chassis frame for the lower level. The rest of it will be 80-20 (to be purchased)
Ed showed me (julia) some Solidworks basics last night, so we'll be able to model our robot this year. (A cool thought from Ed: if FIRST has modeled the rack, we can get an idea for how our robot design will interact with the rack all on the computer).
Lastly, we still a parent to help us build the Rack (field element). We're pretty sure we've found a place to put it (the cafeteria), so please reply ASAP if you can help out (an email also went out to parents about this). Students, please ask your parents if they can help out!
So, stuff to prototype:
- hi-mounted rotating arm
- elevator/forklift
- grippers to test with above arms
- 2 ramp ideas
Before we prototype, there are some important things to do first:
- Create blueprints (not Kersten-Julia-Chrissy sketches) for the two arm designs with side, front, and top views (dimensions and all that good stuff, too)
- Also make blueprints for the different grippers
- Come up with BoM (Bill of Materials)--stuff we need to build prototypes
- Inventory parts we have (like 80-20 L-brackets, bearings & steel rod for the rotating arm?), so we don't spend $ unnecessarily
- Enlarge our calendar, so that we can coordinate with Prog/Electronics on the same calendar.
Other robot info:
- The length of a rotating arm will be roughly 5' (we have better numbers than this)
- To build our prototype chassis, we're going to use our pre-season welded chassis frame for the lower level. The rest of it will be 80-20 (to be purchased)
Ed showed me (julia) some Solidworks basics last night, so we'll be able to model our robot this year. (A cool thought from Ed: if FIRST has modeled the rack, we can get an idea for how our robot design will interact with the rack all on the computer).
Lastly, we still a parent to help us build the Rack (field element). We're pretty sure we've found a place to put it (the cafeteria), so please reply ASAP if you can help out (an email also went out to parents about this). Students, please ask your parents if they can help out!
Sunday, January 07, 2007
Sunday, Jan 7
Hello!
So today the build and programming teams met. The build team did some brainstorming and prototyping, and we've clarified and narrowed down some of our design ideas. If you haven't seen the project calendar with all the deadlines, take a look. It's on the board in the project room.
We also talked with Emily today and discussed our designs.
See you tomorrow!
So today the build and programming teams met. The build team did some brainstorming and prototyping, and we've clarified and narrowed down some of our design ideas. If you haven't seen the project calendar with all the deadlines, take a look. It's on the board in the project room.
We also talked with Emily today and discussed our designs.
See you tomorrow!
Saturday, December 23, 2006
Get Excited for 2007!
Hello Team!
Thank you so much for signing up for Castilleja's Robotics Team: FIRST
Team 1700!
This will be our third season as a team, and we expect to rock! This email will outline the major dates for the 2007 season, what to expect and how to get involved. Please look it over, mark your calendars, and get psyched!
FIRST (For Inspiration and Recognition of Science and Technology), was founded in 1992 by Dean Kamen, "To create a world where science and technology are celebrated... where young people dream of becoming science and technology heroes". In 2006, its flagship program, the FIRST Robotics Competition, reached more than 28,000 high school students on
1,133 teams in 33 regional competitions. FIRST's multinational competition teams professionals and young people to solve an engineering design problem in an intense and competitive way. Its goal is to motivate young people to pursue education and career opportunities in science, technology, engineering, and math, while building self-confidence, knowledge, and life skills. Check out the website:
http://www.usfirst.org/community/frc/
Sat Jan 6, 2007 KICK OFF DAY! Meet at Castilleja, in the Choral Room, at 12 noon. Team leaders will be returning from San Jose State with the Challenge Announcement, Game Rules, and the Kit of Parts. Be ready to brainstorm, inventory all the cool gadgets and gizmos, and start working on the challenge. Plan on working with the team until 5pm. ALL PARENTS
are urged to stay at 12 noon for a special parent meeting to discuss team supervision, meals and logistics. Be there or be square - Lunch will be served!
As a reminder, the kick off day is the SATURDAY BEFORE school starts. Although we would love if everyone could come, we also realize that some of you might be away of vacation. Please let us know ASAP if you are unable to attend.
Sun Jan 7, 11 am to 5pm - continue brainstorming/ possibly prototype the robot.
Mon - Fri, Jan 8 - 14 (Global Week) We will meet daily after school 4 - 7 pm to work on the Challenge.
The team will work daily in the evenings after school, and weekends, to prototype and build the robot, develop the programming that controls it, create the team web site, and our team animation entry. Find the project that interests you most, work hard and HAVE FUN! We ask that Parents help provide supervision and meals.
Feb 20, 2007 Robot Shipping Deadline - Fed Ex will pick up our Robot by 5pm. Please note that the Ship Date is during Ski Week. This is usually the most intense time for build and programming, so we ask that everyone be here for it.
Feb 22, 2007 Website Design Deadline - our Website is up for Award consideration.
March 1 - 3, 2007 Pacific Northwest Regional FIRST competition in Portland, Oregon.
About a dozen team members will go. This is where we won the KPCB Entrepreneurship award in 2006.
March 15 - 17, 2007 Silicon Valley Regional FIRST competition at San Jose State Event Center.
All team members participate in this exciting tournament. This is where we won another KPCB Entrepreneurship award, and
the Engineering Inspiration Award in 2006.
April 12 -14, 2007 FIRST National Championships in Atlanta, Georgia.
About a dozen team members will go. This is where we won the Daimler Chrysler Team Spirit Award in 2006. Keep in mind that the Nationals are during the second weekend of spring Spring Break (meaning that we will leave the wednesday of break).
We'd love for the whole team to go to the out-of-town competitions, but unfortunately that is not financially or organizationally feasible. Team members will qualify to attend the out-of-state tournaments by hard work and dedication to meeting the goals of the team and through their "gracious professionalism."
Thank You and GET EXCITED!
PLEASE send me an e-mail saying that you have read this, and let me know if you are able to make it to kickoff, a simple yes or no in the subject line will suffice :)
THANK YOU!!!
Team Lead
-Chrissy Crone
(Cell: 650-339-2028)
Technical Lead
-Julia Lee
(Cell: 408-482-5196)
Non-Technical Lead
-Hannah Sachs
(Cell: 650-248-8687)
Thank you so much for signing up for Castilleja's Robotics Team: FIRST
Team 1700!
This will be our third season as a team, and we expect to rock! This email will outline the major dates for the 2007 season, what to expect and how to get involved. Please look it over, mark your calendars, and get psyched!
FIRST (For Inspiration and Recognition of Science and Technology), was founded in 1992 by Dean Kamen, "To create a world where science and technology are celebrated... where young people dream of becoming science and technology heroes". In 2006, its flagship program, the FIRST Robotics Competition, reached more than 28,000 high school students on
1,133 teams in 33 regional competitions. FIRST's multinational competition teams professionals and young people to solve an engineering design problem in an intense and competitive way. Its goal is to motivate young people to pursue education and career opportunities in science, technology, engineering, and math, while building self-confidence, knowledge, and life skills. Check out the website:
http://www.usfirst.org/community/frc/
Sat Jan 6, 2007 KICK OFF DAY! Meet at Castilleja, in the Choral Room, at 12 noon. Team leaders will be returning from San Jose State with the Challenge Announcement, Game Rules, and the Kit of Parts. Be ready to brainstorm, inventory all the cool gadgets and gizmos, and start working on the challenge. Plan on working with the team until 5pm. ALL PARENTS
are urged to stay at 12 noon for a special parent meeting to discuss team supervision, meals and logistics. Be there or be square - Lunch will be served!
As a reminder, the kick off day is the SATURDAY BEFORE school starts. Although we would love if everyone could come, we also realize that some of you might be away of vacation. Please let us know ASAP if you are unable to attend.
Sun Jan 7, 11 am to 5pm - continue brainstorming/ possibly prototype the robot.
Mon - Fri, Jan 8 - 14 (Global Week) We will meet daily after school 4 - 7 pm to work on the Challenge.
The team will work daily in the evenings after school, and weekends, to prototype and build the robot, develop the programming that controls it, create the team web site, and our team animation entry. Find the project that interests you most, work hard and HAVE FUN! We ask that Parents help provide supervision and meals.
Feb 20, 2007 Robot Shipping Deadline - Fed Ex will pick up our Robot by 5pm. Please note that the Ship Date is during Ski Week. This is usually the most intense time for build and programming, so we ask that everyone be here for it.
Feb 22, 2007 Website Design Deadline - our Website is up for Award consideration.
March 1 - 3, 2007 Pacific Northwest Regional FIRST competition in Portland, Oregon.
About a dozen team members will go. This is where we won the KPCB Entrepreneurship award in 2006.
March 15 - 17, 2007 Silicon Valley Regional FIRST competition at San Jose State Event Center.
All team members participate in this exciting tournament. This is where we won another KPCB Entrepreneurship award, and
the Engineering Inspiration Award in 2006.
April 12 -14, 2007 FIRST National Championships in Atlanta, Georgia.
About a dozen team members will go. This is where we won the Daimler Chrysler Team Spirit Award in 2006. Keep in mind that the Nationals are during the second weekend of spring Spring Break (meaning that we will leave the wednesday of break).
We'd love for the whole team to go to the out-of-town competitions, but unfortunately that is not financially or organizationally feasible. Team members will qualify to attend the out-of-state tournaments by hard work and dedication to meeting the goals of the team and through their "gracious professionalism."
Thank You and GET EXCITED!
PLEASE send me an e-mail saying that you have read this, and let me know if you are able to make it to kickoff, a simple yes or no in the subject line will suffice :)
THANK YOU!!!
Team Lead
-Chrissy Crone
(Cell: 650-339-2028)
Technical Lead
-Julia Lee
(Cell: 408-482-5196)
Non-Technical Lead
-Hannah Sachs
(Cell: 650-248-8687)
Thursday, December 14, 2006
More cool stuff
photos from our trip to IDEO (and more)!
check out Jim's awesome shadow on the wall (in the welding fieldtrip album):
http://picasaweb.google.com/castilleja.robotics
check out Jim's awesome shadow on the wall (in the welding fieldtrip album):
http://picasaweb.google.com/castilleja.robotics
Field Trip to Ideo + WELDING
so today we (kersten, julia, and chrissy) brought the crew (nandini, melissa, ida, caroline, mary, and sherri)to ideo to 1. show them around the shop and 2. watch jimmy (who most generously skipped his meeting)weld the side rails onto the prototype chassis, so now it is all (most) ready to put wheels on.
upon return to casti, we got to work drilling holes for wheels, playing with the electronics board, taking the old tread off the wheels and putting the spiffy new tread on. we're also working on putting together some new wheels, so yay!
have i mentioned how excited for the season i am?
...
i am SO excited for the season!!!
upon return to casti, we got to work drilling holes for wheels, playing with the electronics board, taking the old tread off the wheels and putting the spiffy new tread on. we're also working on putting together some new wheels, so yay!
have i mentioned how excited for the season i am?
...
i am SO excited for the season!!!
Friday, December 08, 2006
Field Trip to Alan Steel!
Today we went to alan steel. As usual, it was a ton of fun and we saw some really neat stuff. We also bought the additional aluminum we need to finish building the prototype chassis, so we can move forward with that next week. We'll also put treads on the new wheels because we bought a hose clamp! Get excited!
Happy Birthday, Erin.
Happy Birthday, Erin.
Thursday, December 07, 2006
1st Build Meeting!
YAY! The build team has met!
Tursday night we convened in the project room in the science wing (not the presentation rooms, fyi) from 5-7, as usual. Thanks to Nandini, Caroline, Sherri, and Melissa for showing up. We took the wheels we are going to re-use off Rosie (last year's robot) and assembled the other wheels to be used for this year's robot. We also drilled more holes in the proto-type chassis. Yep, lots of hands-on work : ) Hooray!
Tursday night we convened in the project room in the science wing (not the presentation rooms, fyi) from 5-7, as usual. Thanks to Nandini, Caroline, Sherri, and Melissa for showing up. We took the wheels we are going to re-use off Rosie (last year's robot) and assembled the other wheels to be used for this year's robot. We also drilled more holes in the proto-type chassis. Yep, lots of hands-on work : ) Hooray!
Sunday, July 16, 2006
CalGames (October 27-28)
Dear gang,
Sorry I haven't had a chance to write back sooner!
It was really good to meet up at Google last Saturday with the CalGames folks from the Western Regional Robotics Forum (www.wrrf.org). Julia, just a warmning - the website sort of sucks. The information on it is outdated so I'll forward you information from Ceal Craig (one of the coordinators) after this email.
So, on the CalGames note, here are my thoughts:
I had lunch with Chrissy on Friday. She and I think it's going to take a lot of effort, and that we should make sure that we have a critical mass committed to doing this beforehand. This is not to be pessimistic or anything, but given that it is a volunteer-heavy event, if only like FIVE of us go, it's going to be painful. I *really* don't like it when someone commits me to doing / supporting something people don't pull through.
Kersten, I TOTALLY agree with you on the volunteering hours / community work thing. We can certainly recruit a lot of Casti students to come and the community hours thing is an incentive. Does the October 27-28 dates conflict with any school events?
On that note, I believe there is another option - if we DON'T want to enter as a team for the $600 entrance fee, there's nothing that says that we can't bring a gang of volunteers and new robotics rookies to HELP OUT! This would be low key, no prep in advance, and really great for exposing new students what a robotics competition is like, and of course, give them community service hours.
So here are my goals:
1. Bring at least 10 students to CalGames, of which at least 5 are new students. This is a great opportunity to expose newbies!
2. If we are serious about entering the competition, we should be serious about attempting to do well. I am not comfortable bringing new students to the competition and putting them at the wheel without at least attempting to leverage this opportunity to repair Rosie. I *do not* a new student's first experience with robotics to be a stressful one, where they watch us scramble before each match to make a new PVC chain tensioner. I just can't see myself being there watching that happen again.
If we don't have time to spend taking this competition seriously, we should considering going the less stressful route of putting our hearts into VOLUNTEERING FOR IT. I am not going to do anything half way.
3. Here are some realistic things that we can do to leverage this as a learning opportunity. Deadlines are GREAT for getting us to learn and getting us to do stuff during the off season.
* Build a new chassis. Kersten's learning to weld, and Julia is learning to put together weldment drawings in Solidworks. Chrissy has an Aluminum REM trip in the works. If we set aside some time and commit to this, I will do my part and convince Jimmy to give up a Saturday to work with you to design and weld an aluminum frame. This can be your test run before the US FIRST season. (Kersten, you'll discover that welding steel is a cinch, but aluminum is a whole another world that takes like years to learn)
* Improve the autonomous code and sensor / actuator systems. I'll work with Erin and Alecia to do this but this means we actually need a working robot that uh, drives straight when we ask it to.
My goal is help get people excited and bring people up to speed during the off season. CalGames can be the catalyst for that, but it doesn't need to be. Does that make sense? If CalGames takes all the wind out of me to coordinate and make happen, which means I have less time to teach people how to program, how to do electric stuff, gather materials and set up for the 2007, I would not be comfortable signing up.
Yeah.
Signing out,
Em
Sorry I haven't had a chance to write back sooner!
It was really good to meet up at Google last Saturday with the CalGames folks from the Western Regional Robotics Forum (www.wrrf.org). Julia, just a warmning - the website sort of sucks. The information on it is outdated so I'll forward you information from Ceal Craig (one of the coordinators) after this email.
So, on the CalGames note, here are my thoughts:
I had lunch with Chrissy on Friday. She and I think it's going to take a lot of effort, and that we should make sure that we have a critical mass committed to doing this beforehand. This is not to be pessimistic or anything, but given that it is a volunteer-heavy event, if only like FIVE of us go, it's going to be painful. I *really* don't like it when someone commits me to doing / supporting something people don't pull through.
Kersten, I TOTALLY agree with you on the volunteering hours / community work thing. We can certainly recruit a lot of Casti students to come and the community hours thing is an incentive. Does the October 27-28 dates conflict with any school events?
On that note, I believe there is another option - if we DON'T want to enter as a team for the $600 entrance fee, there's nothing that says that we can't bring a gang of volunteers and new robotics rookies to HELP OUT! This would be low key, no prep in advance, and really great for exposing new students what a robotics competition is like, and of course, give them community service hours.
So here are my goals:
1. Bring at least 10 students to CalGames, of which at least 5 are new students. This is a great opportunity to expose newbies!
2. If we are serious about entering the competition, we should be serious about attempting to do well. I am not comfortable bringing new students to the competition and putting them at the wheel without at least attempting to leverage this opportunity to repair Rosie. I *do not* a new student's first experience with robotics to be a stressful one, where they watch us scramble before each match to make a new PVC chain tensioner. I just can't see myself being there watching that happen again.
If we don't have time to spend taking this competition seriously, we should considering going the less stressful route of putting our hearts into VOLUNTEERING FOR IT. I am not going to do anything half way.
3. Here are some realistic things that we can do to leverage this as a learning opportunity. Deadlines are GREAT for getting us to learn and getting us to do stuff during the off season.
* Build a new chassis. Kersten's learning to weld, and Julia is learning to put together weldment drawings in Solidworks. Chrissy has an Aluminum REM trip in the works. If we set aside some time and commit to this, I will do my part and convince Jimmy to give up a Saturday to work with you to design and weld an aluminum frame. This can be your test run before the US FIRST season. (Kersten, you'll discover that welding steel is a cinch, but aluminum is a whole another world that takes like years to learn)
* Improve the autonomous code and sensor / actuator systems. I'll work with Erin and Alecia to do this but this means we actually need a working robot that uh, drives straight when we ask it to.
My goal is help get people excited and bring people up to speed during the off season. CalGames can be the catalyst for that, but it doesn't need to be. Does that make sense? If CalGames takes all the wind out of me to coordinate and make happen, which means I have less time to teach people how to program, how to do electric stuff, gather materials and set up for the 2007, I would not be comfortable signing up.
Yeah.
Signing out,
Em
Monday, June 19, 2006
The Shop
I don't know if anyone is actually reading this right now, but if you are:
What do you think of putting some shelving in the shop? Like, some actual robotics shelving, it might just be a shelf under the table in the back, but we could put, for example, the stuff currently in the corner of the project room down there and free up some space. I think it would be fine down there, we'd just have to make it clear that other people shouldn't touch it.
If there's no room for actual shelving, we might just clear a shelf on that rack by the back door and mark it "Robotics," put the long pieces up there, and store the smaller stuff under the table.
Kersten
What do you think of putting some shelving in the shop? Like, some actual robotics shelving, it might just be a shelf under the table in the back, but we could put, for example, the stuff currently in the corner of the project room down there and free up some space. I think it would be fine down there, we'd just have to make it clear that other people shouldn't touch it.
If there's no room for actual shelving, we might just clear a shelf on that rack by the back door and mark it "Robotics," put the long pieces up there, and store the smaller stuff under the table.
Kersten
Sunday, April 23, 2006
Maker Faire Blog Entry
Check out my blog entry on our trip to the Maker Faire here: Maker Faire Blog
Who was there? Kersten, George, Beth, Em, Eric, Debbie, Ryan, Ryan's friend, and possibly Chrissy and Heidi on Sunday?
This lightbulb / egg plotter is one of many cool things we saw!

Who was there? Kersten, George, Beth, Em, Eric, Debbie, Ryan, Ryan's friend, and possibly Chrissy and Heidi on Sunday?
This lightbulb / egg plotter is one of many cool things we saw!

Monday, April 17, 2006
Where are our bumpers?
Does anyone know?
They're the green ones. They're kindof important. We kindof need them in order to make new and better ones. Yeah. Get back to me on this.
ps- kudos to you who are reading the blog.
They're the green ones. They're kindof important. We kindof need them in order to make new and better ones. Yeah. Get back to me on this.
ps- kudos to you who are reading the blog.
Sunday, April 16, 2006
general update: packing (oh boy!)
-we're taking our big metal shelving unit (yes, we found the black plastic pieces)
-we've put together three wheels from IFI robotics and they're a tiny bit lighter than our old wheels!!!
-chrissy and sophia will make bumpers
-i think we're meeting everyday this week (mon-fri) after school until about 4:30 or 4:45 (as usual).
-kersten essentially declared herself our resident packing expert, so chrissy and i have decided to let her do everything (ha ha!)
-we've put together three wheels from IFI robotics and they're a tiny bit lighter than our old wheels!!!
-chrissy and sophia will make bumpers
-i think we're meeting everyday this week (mon-fri) after school until about 4:30 or 4:45 (as usual).
-kersten essentially declared herself our resident packing expert, so chrissy and i have decided to let her do everything (ha ha!)
Friday, April 14, 2006
boxes
so you know the two semi-translucent boxes with screws and bolts and such in them- one labelled machine screws, the other wood screws? I think we took them to SVR, but I'm pretty sure they weren't at Portland, and I'm wondering if we actually need them. Does anyone have a reason for why we should take them? Because they're heavy and we already have most (if not all) of the stuff we know we need in other boxes.
Also, I'm thinking we just wrap a lot of tape around the boxes to keep them from coming open (in addition to using the little holes for zip tying them closed), but does anyone have doubts about that? Because I can try to contact 114 and ask how they secured their stuff to Portland in the boxes, cuz that seemed to work.
We've got two boxes packed and (according to J Rock's unreliable scales) under the 50 (or is it 55?) lb weight limit, and looks like we can fit the rest of the stuff in the remaining three boxes fine. I hope nobody minds that we have some chunks of noodle in the bins, because we're too cheap to get actual bubble wrap. Since most of the stuff from the bins will be moved to the shelves, I figure storage for the noodles shouldn't be a problem in the pit.
If anyone is reading this, how about you give me a call and tell me if you can meet on Sunday (bear in mind that it's Easter for some of you). I think I might be able to, if I get my homework done.
Kudos to all the people who did cool stuff over break.
Kersten
Also, I'm thinking we just wrap a lot of tape around the boxes to keep them from coming open (in addition to using the little holes for zip tying them closed), but does anyone have doubts about that? Because I can try to contact 114 and ask how they secured their stuff to Portland in the boxes, cuz that seemed to work.
We've got two boxes packed and (according to J Rock's unreliable scales) under the 50 (or is it 55?) lb weight limit, and looks like we can fit the rest of the stuff in the remaining three boxes fine. I hope nobody minds that we have some chunks of noodle in the bins, because we're too cheap to get actual bubble wrap. Since most of the stuff from the bins will be moved to the shelves, I figure storage for the noodles shouldn't be a problem in the pit.
If anyone is reading this, how about you give me a call and tell me if you can meet on Sunday (bear in mind that it's Easter for some of you). I think I might be able to, if I get my homework done.
Kudos to all the people who did cool stuff over break.
Kersten
Subscribe to:
Comments (Atom)