-shifrah divya sallie and allie made bumpers. and did some interpretive dance.
-caroline spent a lot of time trying to things to download correctly - we finally figured out the correct wiring which is now labeled nicely. please don't change the wiring without checking - things work for now at least. :) we also learned that we have to "disconnect from the crio" rather than simply stopping the code like we've been doing. we then have to remember to connect the next time. also, do not try to run anything while there's code set as the startup code. we're not sure if this is the root of the problem, but it has been not working when we haven't done this. i'm kind of worried about how to truly program if we keep having downloading problems on a daily basis. hopefully, we've finally figured things out once and for all, but we've got to figure out a foolproof method.
-anne nan erin talked tower? i don't really have details, sorry.
-ida and i spent a lot of time writing chairmans/exec summary/woodie flowers/editing website. we'll continue doing that.
tomorrow: 11-5.

Saturday, February 07, 2009


Thursday, February 05, 2009
10 DAYS.
ten days to go! with no moving chassis and no tower, i'm beginning to descend into the panic stage. but i know, somehow, we'll make it.
tonight's progress:
-coding took a look over the accelerometer/encoder stuff from yesterday. there's some scary math involving integrals and derivitaves that i totally do not understand, but i do know that essentially we're just making the encoder and the accelerometer speak the same language - that's the "value" i talk about below. what we're trying to do is compare the encoder values [speed of wheels] and accelerometer value [speed of robot.] if we are slipping, then the encoder value will be higher than the accelerometer value. if the difference between the two is above some constant, then we want to slow the motor down.
-so caroline wrote the code to do that BUT in the process of testing it we realized the accelerometer was not working...
-which led us to the discovery, after some serious frustration, that the analog breakout circuit board [what you plug analog sensors into on the crio] is BROKEN. there's a diode that is essentially falling off. and the entire thing was incredibly hot after only having power attached for all of ten seconds. eek. we called doug, our electronics expert, who came down immediately and has taken the board home to see if it can be salvaged. he worked some serious magic on the gts last year, so if anyone can fix it, it's doug.
-if not, we've asked ms mourad to order another analog breakout ASAP.
-nandini and anna put the weatherproof tape in the crate. anna's our resident tarping expert by now :)
-nandini made a detailed drawing of the tower/corkscrew/etc
-we started to make a to-scale prototype of the corkscrew with supports out of 80-20. karlin [and i] worries that the tall part of the supports will be too shaky to actually be supportive. we didn't manage to make the prototype the correct size, and were balancing the hose awkwardly and it was late, so we decided to pick up work tomorrow, but we definitely want to finish the prototype to ensure that the concept will actually work. the idea is to fasten the hose to the supports [probably 1-by-1 tubing] with L-brackets.
-sallie divya and tobi started making a bom for bumpers.
-tanya came by today, so allie and annie were solidworksing. perhaps they blogged about it?
infinite thanks to both karlin and doug for their energy and patience.
tonight's progress:
-coding took a look over the accelerometer/encoder stuff from yesterday. there's some scary math involving integrals and derivitaves that i totally do not understand, but i do know that essentially we're just making the encoder and the accelerometer speak the same language - that's the "value" i talk about below. what we're trying to do is compare the encoder values [speed of wheels] and accelerometer value [speed of robot.] if we are slipping, then the encoder value will be higher than the accelerometer value. if the difference between the two is above some constant, then we want to slow the motor down.
-so caroline wrote the code to do that BUT in the process of testing it we realized the accelerometer was not working...
-which led us to the discovery, after some serious frustration, that the analog breakout circuit board [what you plug analog sensors into on the crio] is BROKEN. there's a diode that is essentially falling off. and the entire thing was incredibly hot after only having power attached for all of ten seconds. eek. we called doug, our electronics expert, who came down immediately and has taken the board home to see if it can be salvaged. he worked some serious magic on the gts last year, so if anyone can fix it, it's doug.
-if not, we've asked ms mourad to order another analog breakout ASAP.
-nandini and anna put the weatherproof tape in the crate. anna's our resident tarping expert by now :)
-nandini made a detailed drawing of the tower/corkscrew/etc
-we started to make a to-scale prototype of the corkscrew with supports out of 80-20. karlin [and i] worries that the tall part of the supports will be too shaky to actually be supportive. we didn't manage to make the prototype the correct size, and were balancing the hose awkwardly and it was late, so we decided to pick up work tomorrow, but we definitely want to finish the prototype to ensure that the concept will actually work. the idea is to fasten the hose to the supports [probably 1-by-1 tubing] with L-brackets.
-sallie divya and tobi started making a bom for bumpers.
-tanya came by today, so allie and annie were solidworksing. perhaps they blogged about it?
infinite thanks to both karlin and doug for their energy and patience.


Wednesday, February 04, 2009
Tuesday, February 03, 2009
A Successful Day
So, today was a productive day for the build team. Right after school, Anne, Nandini and I went over to IDEO to talk to Jimmy about brush options and construction of the chassis. Yesterday, Doug purchased some large brooms of varying bristle stiffnesses for us to prototype with. We showed these to Jimmy and then returned to school and prototyped with them. It looks like we will be using the softer-bristled red broom. We split the broom in half and put the pieces back-to-back with a pole in the middle, which was then attached to the drill. This was surprusingly effective at moving the ball up the full-scale prototype ramp we created. From this prototype, we learned that we will only need one front brush to bring the balls in. We also fine-tuned the dimensions for the ramp so that when the chassis is done we can start working right away on the construction of the ramp/brush device. Tomorrow I am planning on heading over to Home Depot to buy some more brooms.
As for programming, Karlin explained traction control and how we can implement it on our robot using encoders and an accelerometer.
A lot of people have been wondering about going over to IDEO. This year, since Emily no longer works there, we will be going over a lot less. We will be doing most of our work at Castilleja. However, we will need to test code and install the electronics board at IDEO, so a few people may go over then. We will work out a system so that everyone who wants to see the shop can go over at some point during the season.
That's all for now. See you tomorrow at 5:15.
As for programming, Karlin explained traction control and how we can implement it on our robot using encoders and an accelerometer.
A lot of people have been wondering about going over to IDEO. This year, since Emily no longer works there, we will be going over a lot less. We will be doing most of our work at Castilleja. However, we will need to test code and install the electronics board at IDEO, so a few people may go over then. We will work out a system so that everyone who wants to see the shop can go over at some point during the season.
That's all for now. See you tomorrow at 5:15.
Monday, February 02, 2009
Sunday, February 01, 2009
A Successful Programming Day
HI!
Today we solved some of our programming problems from yesterday... so yay!
first, yesterday the code would not download to the cRIO. We could run it from the laptop, but couldnt turn on the robot and have it work again. We followed all the steps again, and Karlin helped us check they were correct against another copy of FIRST documentation. After patiently waiting through the computer finding the cRIO, we managed to download the code to the robot.
second... Erin, Caroline and Karlin added an acceleration control to the drive code. Remember when we would put the joystick all the way forward and the robot would spin in place? well, now it ramps up to full speed w a small time delay to prevent it from spinning in place. We added a filter to the joystick inputs (a handy feature of labview hahaha), and put a time delay on it.
third...Divya and Tobi coded up the front brushes with buttons for two speeds, and the roller for the tube (anne and nan have decided to add a roller since we cant get as close to the trailers anymore)
fourth: Divya and I made a table of the PWMs and buttons, to keep things straight and easy to reference
fifth: Divya, Tobi, and Sallie straightened up the wires on the electronics board (under erins orgainzing guidance), since they were super messy and likely dangerous before.
Solidworks: Annie and Allie modeled the corkscrew for raising the balls, and a brush thing to go with them
Build:
anne and nan have been working on prototyping the corkscrew. They also went to ACE with erin and brian to search for materials for the corkscrew and look at brushes. Also, they have been trying to figure out what to do with our new chassis design so we dont have to alter our game strategy and can still dump balls. I dont know exactly what else they've been up to, so maybe more information to come from one of them.
This week:
meeting 5-8, however, we will be going past eight when there are things that have to be done and finished since we are entering the second to last week.
To Do:
Programming:
-find a place for the encoders in the gear boxes
-write encoder code -- traction control
-autonomous (we dont want ppl to find us and dump balls in during the autonomous period, therefore, the "avoid" strategy)
Build:
-choose materials (corkscrew, brushes, dumping tube)
-construction of corkscrew (discuss w jimmy)
-choose motors
-lip on dumping tube
see you all tomorrow!
caroline
Today we solved some of our programming problems from yesterday... so yay!
first, yesterday the code would not download to the cRIO. We could run it from the laptop, but couldnt turn on the robot and have it work again. We followed all the steps again, and Karlin helped us check they were correct against another copy of FIRST documentation. After patiently waiting through the computer finding the cRIO, we managed to download the code to the robot.
second... Erin, Caroline and Karlin added an acceleration control to the drive code. Remember when we would put the joystick all the way forward and the robot would spin in place? well, now it ramps up to full speed w a small time delay to prevent it from spinning in place. We added a filter to the joystick inputs (a handy feature of labview hahaha), and put a time delay on it.
third...Divya and Tobi coded up the front brushes with buttons for two speeds, and the roller for the tube (anne and nan have decided to add a roller since we cant get as close to the trailers anymore)
fourth: Divya and I made a table of the PWMs and buttons, to keep things straight and easy to reference
fifth: Divya, Tobi, and Sallie straightened up the wires on the electronics board (under erins orgainzing guidance), since they were super messy and likely dangerous before.
Solidworks: Annie and Allie modeled the corkscrew for raising the balls, and a brush thing to go with them
Build:
anne and nan have been working on prototyping the corkscrew. They also went to ACE with erin and brian to search for materials for the corkscrew and look at brushes. Also, they have been trying to figure out what to do with our new chassis design so we dont have to alter our game strategy and can still dump balls. I dont know exactly what else they've been up to, so maybe more information to come from one of them.
This week:
meeting 5-8, however, we will be going past eight when there are things that have to be done and finished since we are entering the second to last week.
To Do:
Programming:
-find a place for the encoders in the gear boxes
-write encoder code -- traction control
-autonomous (we dont want ppl to find us and dump balls in during the autonomous period, therefore, the "avoid" strategy)
Build:
-choose materials (corkscrew, brushes, dumping tube)
-construction of corkscrew (discuss w jimmy)
-choose motors
-lip on dumping tube
see you all tomorrow!
caroline
Saturday, January 31, 2009

first of all, maybe other people know about this website http://thebluealliance.tumblr.com/ but i did not - and i'm really excited about it. it's basically a compilation of all the best videos of first teams. there's a cool one of a helix which leads up to a shooting mechanism.
in other news today
-tobi divya and sallie got the new encoders set up [we're still waiting on two of them]
-we finally tested out drive code on a moving chassis! the given code works fairly well, although if you move the joystick too far forward it tries to accelerate too much. jessa and karlin suggested an acceleration capoff type thing, which we're hoping to try tomorrow
-downloading issues... we can run the code from the laptop and step through it, so that's good for testing. but it won't actually download the code properly. we're hoping to fix that tomorrow.
-build: i know there was some prototyping and redesigning, but don't have details, sorry. we decided to square off the ends of the chassis' u-bits. basically, imagine last year's chassis but without the middle bar in the front.
-ida and i discussed all the various essays and documents we're submitting. so glad we're doing this earlier this year!
11-3 tomorrow
in other news today
-tobi divya and sallie got the new encoders set up [we're still waiting on two of them]
-we finally tested out drive code on a moving chassis! the given code works fairly well, although if you move the joystick too far forward it tries to accelerate too much. jessa and karlin suggested an acceleration capoff type thing, which we're hoping to try tomorrow
-downloading issues... we can run the code from the laptop and step through it, so that's good for testing. but it won't actually download the code properly. we're hoping to fix that tomorrow.
-build: i know there was some prototyping and redesigning, but don't have details, sorry. we decided to square off the ends of the chassis' u-bits. basically, imagine last year's chassis but without the middle bar in the front.
-ida and i discussed all the various essays and documents we're submitting. so glad we're doing this earlier this year!
11-3 tomorrow
Friday, January 30, 2009
e board READY TO GO
during p6 and briefly after school, erin caroline and i finished up the wiring on the electronics board and tested to see that code downloads etc
MEANING we can now test out the given ArcadeDrive functions from FIRST as well as write our own drive code! and we can test it on a real live robot [albeit not the one we'll actually end up using.] but let the real programming begin!
meeting 11-3 this weekend, as usual
see you tomorrow
MEANING we can now test out the given ArcadeDrive functions from FIRST as well as write our own drive code! and we can test it on a real live robot [albeit not the one we'll actually end up using.] but let the real programming begin!
meeting 11-3 this weekend, as usual
see you tomorrow
Thursday, January 29, 2009
thursday
-took electronics board off benji, put one for new control system on. caroline and i will finish up the wiring tmrw.
-spent about an hour trying to figure out how to put the dumb wires in the dumb wago. finally figured it out.
-a wiry cage thing for the corkscrew was built
-more brush bits were cut and annie and anna epoxy-ed more brush bits onto the tube
-we discovered our chassis design will be illegal - the first games committee didn't approve a design v. similar to ours. :( so we'll still have a U, there just won't be angly bits. anne will email jim tonight and let's hope he hasn't already welded it, although i think he has.
we did show benji to the kids at seton and they were really excited about it :) pictures to come.
sorry not more detail tonight - exhausted.
enjoy your DAY OFF tomorrow!
-spent about an hour trying to figure out how to put the dumb wires in the dumb wago. finally figured it out.
-a wiry cage thing for the corkscrew was built
-more brush bits were cut and annie and anna epoxy-ed more brush bits onto the tube
-we discovered our chassis design will be illegal - the first games committee didn't approve a design v. similar to ours. :( so we'll still have a U, there just won't be angly bits. anne will email jim tonight and let's hope he hasn't already welded it, although i think he has.
we did show benji to the kids at seton and they were really excited about it :) pictures to come.
sorry not more detail tonight - exhausted.
enjoy your DAY OFF tomorrow!
Wednesday, January 28, 2009
wednesday, january 28
(first part written by divya)
today in programming, we (tobi, malaika, and i) velcro-ed the electronic components onto a practice board. ok...yeeeeeeah that's kind of all we did.
toodles!
-divya
(now written by anne)
today build was uber exciting :)
the sophomores and freshmen made an amazing prototype of a "curved ledge" for the spiral corkscrew in the middle.
we also made a ghetto prototype of the brush for the corkscrew (made out of pvc and brushes epoxy-ed onto it). we powered it with a drill and tested it with our foamcore prototype of a tube with ramps and it works! yay! this could mean that we can make our own brushes instead of buying the $400 and 30-lb. cylindrical conveyor brush from mcmaster. (however, we already bought a 20" brush...)
jessa came today and we did tooooooooooons of fizzix and math... and we realized that we'll need lots of POWER for the brush in the corkscrew. we don't think the globe motor will provide enough power, and it's the strongest motor we have (other than the cim motors). which leaves us with a tough decision, because we can only use a maximum of 4 cim motors on our robot.
sooooooooo... we've decided that we will use a tank drive instead of operating the 4 wheels independently. that way, we'll only use 2 cim motors for the drive train and we can use 1 cim motor for the brush in the corkscrew.
also we got another moon ball today! which brings the grand total up to 5.
cheerio!
-anne
p.s. anna and shifrah made QUADRAPUS out of duct tape. go to picasa for pix :)
today in programming, we (tobi, malaika, and i) velcro-ed the electronic components onto a practice board. ok...yeeeeeeah that's kind of all we did.
toodles!
-divya
(now written by anne)
today build was uber exciting :)
the sophomores and freshmen made an amazing prototype of a "curved ledge" for the spiral corkscrew in the middle.
we also made a ghetto prototype of the brush for the corkscrew (made out of pvc and brushes epoxy-ed onto it). we powered it with a drill and tested it with our foamcore prototype of a tube with ramps and it works! yay! this could mean that we can make our own brushes instead of buying the $400 and 30-lb. cylindrical conveyor brush from mcmaster. (however, we already bought a 20" brush...)
jessa came today and we did tooooooooooons of fizzix and math... and we realized that we'll need lots of POWER for the brush in the corkscrew. we don't think the globe motor will provide enough power, and it's the strongest motor we have (other than the cim motors). which leaves us with a tough decision, because we can only use a maximum of 4 cim motors on our robot.
sooooooooo... we've decided that we will use a tank drive instead of operating the 4 wheels independently. that way, we'll only use 2 cim motors for the drive train and we can use 1 cim motor for the brush in the corkscrew.
also we got another moon ball today! which brings the grand total up to 5.
cheerio!
-anne
p.s. anna and shifrah made QUADRAPUS out of duct tape. go to picasa for pix :)
picture of chassis

chassis design as of 1/26 - this is the design that jimmy is welding for us. except for the top right wheel, everything else is to scale.
thank you anne for uploading pictures to picasa!
Tuesday, January 27, 2009
mellow tuesday
again, a lowkey programming night - until we can see the given drive code to see how well/badly it drives, we don't have that much to do. writing the code for corkscrew/servo gate is going to be a snap [let's hope i'm not jinxing it by saying that]. we've basically done it already - using a joystick button to control a motor.
-shreya, divya, and tobi wrote simple code of their own! yay! button 2-->arcade drive, and also servo stuff. :)
-we were having wireless issues. again. but then we changed the main battery and things were happier. so maybe the wireless gets more finicky the lower the battery?
-divya grounded the driver station - according to a FIRST update, you have to do it. it wasn't really that exciting, but anyway it's done. basically just wiring a pwm from the gnd endings to this random screw. there were diagrams, she followed them...
-jimmy stopped by with one of the mutant gearboxes! both the axle for the wheel and the motor are on the same side, just like we want :) he's begun to cut the metal meaning we are well on our way to having a chassis!
i have a promise from anndini that one of them will actually blog tonight.
-shreya, divya, and tobi wrote simple code of their own! yay! button 2-->arcade drive, and also servo stuff. :)
-we were having wireless issues. again. but then we changed the main battery and things were happier. so maybe the wireless gets more finicky the lower the battery?
-divya grounded the driver station - according to a FIRST update, you have to do it. it wasn't really that exciting, but anyway it's done. basically just wiring a pwm from the gnd endings to this random screw. there were diagrams, she followed them...
-jimmy stopped by with one of the mutant gearboxes! both the axle for the wheel and the motor are on the same side, just like we want :) he's begun to cut the metal meaning we are well on our way to having a chassis!
i have a promise from anndini that one of them will actually blog tonight.
pwmdeviceref
to find pwmdeviceref - double click the servo icon, control + t, and it's right there.
[because we keep forgetting.]
[because we keep forgetting.]
Monday, January 26, 2009
orbit balls
3 orbit balls have arrived from north carolina!
thank you to sallie and her grandparents!
thank you to sallie and her grandparents!
monday 1/26
programming had a fairly lowkey night, at least so far - we got motors turning off joystick buttons. for the first time, we didn't use the prewritten drive block which baically has everything already done. you just tell it the right speed and the left speed. but today we stepped it up and used a basic motor setup. meaning that you have to open it outside of the while loop, and then set the speed, and then close it... bah so annoying. but it works!
we also got the servo to turn with the prototype gatey thing
honestly, that's all for tonight - it took us an impressively long amount of time to figure out how to work the more complicated motor blocks.
once we have a funcitnal chassis we'll see how well or badly the FIRST written drive code works, and then we'll make decisions about drive code.
anne or nan will blog for build?
we also got the servo to turn with the prototype gatey thing
honestly, that's all for tonight - it took us an impressively long amount of time to figure out how to work the more complicated motor blocks.
once we have a funcitnal chassis we'll see how well or badly the FIRST written drive code works, and then we'll make decisions about drive code.
anne or nan will blog for build?
Sunday, January 25, 2009
sunday of servos and sizing
-karlin, caroline, divya, sallie, and i spent lots of time trying to get the servo set up. in true labview fashion, the actual coding consists of dragging blocks that say "servo open" "get angle" etc together. and yet, it Would Not Work. and we were very frustrated, tried to figure if we needed a speed controller [which would make no sense], messed around with the oscilloscope... and of course, the problem was something so stupid. you need a jumper on the pins next to the PWM. thank you, some random guy on a chief delphi post. as soon as we plugged in the jumper, it worked perfectly. GAH.
-much time was spent discussing where to put gearboxes/motors and which orientation they will go. if we do them the "traditional" way/the way we've done it in the past, there won't be enough room in the middle for the corkscrew. i think the final decision was to place them on the outer bars of the chassis, though i am not sure. i'll double check tomorrow. anyway, the finalfinalfinal chassis drawings were made, and sent to ideo with jimmy. meaning - we're on our way to having a chassis!
-made an order list of sprockets, chain, masterlinks, encoder stuff, etc. this doesn't sound like it takes a lot of time, but uh, it does.
-sallie and divya started to build a potential gate for the servo to turn. the thing's going to have to be really light because the dear servo is incredibly wimpy. although it turns 90 degrees quite beautifully.
-annie and allie were solidworksing. sorry i don't have more details. :/
thank you to the huang family for food and chaperoning and to karlin, doug, and jimmy for their infinite wisdom. and divya often says "you guys deserve a gift."
see you 5:15-8 this week?
-much time was spent discussing where to put gearboxes/motors and which orientation they will go. if we do them the "traditional" way/the way we've done it in the past, there won't be enough room in the middle for the corkscrew. i think the final decision was to place them on the outer bars of the chassis, though i am not sure. i'll double check tomorrow. anyway, the finalfinalfinal chassis drawings were made, and sent to ideo with jimmy. meaning - we're on our way to having a chassis!
-made an order list of sprockets, chain, masterlinks, encoder stuff, etc. this doesn't sound like it takes a lot of time, but uh, it does.
-sallie and divya started to build a potential gate for the servo to turn. the thing's going to have to be really light because the dear servo is incredibly wimpy. although it turns 90 degrees quite beautifully.
-annie and allie were solidworksing. sorry i don't have more details. :/
thank you to the huang family for food and chaperoning and to karlin, doug, and jimmy for their infinite wisdom. and divya often says "you guys deserve a gift."
see you 5:15-8 this week?
Saturday, January 24, 2009
saturday [although it's not over]
 the toilet brush ball collector
the toilet brush ball collector-we have a functioning prototype of the corkscrew concept! made out of foamcore and with a toiletbrush spinning thing, it's amazing. our current "transition" stage design is the corkscrew - conveyer belts just had too many moving parts and was too complex.
-we're researching different long brushes that we can use for the corkscrew. i'm not sure if this makes sense, but i'll hopefully have more pictures on picasa soon. the design is the one that annie wrote about - here's the link to a youtube clip of another team. our design is similar. http://www.youtube.com/watch?v=LlUgVpRckS8&NR=1
-the toilet brushes have been attached to drills and work remarkably well to suck in the balls from the groud. i'm really excited about this. the picture's above.
-anne posted pictures to picasa! the link is to the right - build photos
-anndini are sketching out the final chassis design.
-allie is working on a model of the electronics board in solidworks
-we had a ridiculous number of mentors. emily and julia and kersten and jessa and david and brian. and perhaps too much sugar...
see you all tomorrow - 11 to 3.
Friday, January 23, 2009
arcade drive stuff from karlin
for documentation - karlin sent us an email that explains the math and stuff in the arcade drive vi. :)
I'm attaching an isolated .vi that just contains the "math" for the arcade drive. [sherri note - this is on zak and is called arcadeDrive.vi] All I did was delete any references to motors. If you open this .vi and run it (don't deploy, just open it without opening the FRC project file), you can change the x and y joystick values and then see what the corresponding left/right motor outputs are.
So, yes, the weird signage on the joystick values pretty much makes things incredibly non-intuitive, but it all works out.
With the odd signs, a negative motor output means the motor spins forward and positive motor value means it's spinning backwards. (yay FIRST)
If you look at this file carefully and test out the different joystick values, you should see that the following is what the default arcade drive does (you already figured out most of this - I'm just writing it out to be thorough)
1a. The first case structure is just "square inputs" or not and in the default case, if you look in RobotDefRef, you'll see that the default is "false" (the green switch is off) so it doesn't square the inputs.
1b. so since the default is just to take the x and y values directly, it then sends the joystick values to the second case structure.
2. Within the second case structure, you have 4 cases (true-true, true-false, false-true, false-false) which correspond to the 4 different joystick quadrants.
True-true = lower right quadrant (backward/right)
true-false = upper right quadrant (forward/right)
false-true = lower left quadrant (backward/left)
false-false = upper left quadrant (forward/left)
But in general, the arcade drive takes the maximum of the x or y joystick value and sets that to be the maximum speed of one of the motors (it changes depending on what quadrant you're in).
Then, based on where the joystick is, it either sets both motors to spin at the same rate (x=0) or makes the motors spin at the same rate but in opposite directions (y=0). And when the joystick is in the middle of the quadrant, if you're closer to the x-axis, the arcade drive is set to make the robot pivot, which makes it turn sharply, whereas if it's near the y-axis, it mostly is moving forward/backward and turning only a little. Again, the math for making the motors do that is different within the 4 quadrants.
Um...I don't think that explanation helps any, but just take a look at this file, step through the different joystick locations, and I think you'll see that the "maximum number" block makes sense. Just write down the weird coordinate system and remember that negative motor values = forward and vice versa. It does what you programmed your old robots to do with logic based coding instead of using an equation. We can go over this when I see you.
By the way, you can probably code up the drive code without having the chassis design finished or whatnot. I still think you should put encoders on your drive wheels because it doesn't hurt to have them. You could also just use um...scotty? (forgot the name) and hook up the new control system to it for practice. There would be some ghetto rigging, but I don't think it would be that difficult.
-karlin
I'm attaching an isolated .vi that just contains the "math" for the arcade drive. [sherri note - this is on zak and is called arcadeDrive.vi] All I did was delete any references to motors. If you open this .vi and run it (don't deploy, just open it without opening the FRC project file), you can change the x and y joystick values and then see what the corresponding left/right motor outputs are.
So, yes, the weird signage on the joystick values pretty much makes things incredibly non-intuitive, but it all works out.
With the odd signs, a negative motor output means the motor spins forward and positive motor value means it's spinning backwards. (yay FIRST)
If you look at this file carefully and test out the different joystick values, you should see that the following is what the default arcade drive does (you already figured out most of this - I'm just writing it out to be thorough)
1a. The first case structure is just "square inputs" or not and in the default case, if you look in RobotDefRef, you'll see that the default is "false" (the green switch is off) so it doesn't square the inputs.
1b. so since the default is just to take the x and y values directly, it then sends the joystick values to the second case structure.
2. Within the second case structure, you have 4 cases (true-true, true-false, false-true, false-false) which correspond to the 4 different joystick quadrants.
True-true = lower right quadrant (backward/right)
true-false = upper right quadrant (forward/right)
false-true = lower left quadrant (backward/left)
false-false = upper left quadrant (forward/left)
But in general, the arcade drive takes the maximum of the x or y joystick value and sets that to be the maximum speed of one of the motors (it changes depending on what quadrant you're in).
Then, based on where the joystick is, it either sets both motors to spin at the same rate (x=0) or makes the motors spin at the same rate but in opposite directions (y=0). And when the joystick is in the middle of the quadrant, if you're closer to the x-axis, the arcade drive is set to make the robot pivot, which makes it turn sharply, whereas if it's near the y-axis, it mostly is moving forward/backward and turning only a little. Again, the math for making the motors do that is different within the 4 quadrants.
Um...I don't think that explanation helps any, but just take a look at this file, step through the different joystick locations, and I think you'll see that the "maximum number" block makes sense. Just write down the weird coordinate system and remember that negative motor values = forward and vice versa. It does what you programmed your old robots to do with logic based coding instead of using an equation. We can go over this when I see you.
By the way, you can probably code up the drive code without having the chassis design finished or whatnot. I still think you should put encoders on your drive wheels because it doesn't hurt to have them. You could also just use um...scotty? (forgot the name) and hook up the new control system to it for practice. There would be some ghetto rigging, but I don't think it would be that difficult.
-karlin
Thursday, January 22, 2009
Corkscrew Design
This is a link to a corkscrew helix design (click on title) that looks pretty cool. As opposed to having the whole corkscrew rotating, they have just an inside brush rotating that catches and lifts up the ball. 1. The brush works, and 2. This is a simpler way to do a corkscrew. The ball would always make it in, because the screw itself wouldn't move, so the path into the corkscrew could always be open. Also, maybe more balls could be stored? I know we just came up with our final design, but it's something else to think about for our tower.
~Annie
Tuesday, January 20, 2009
tuesday - design review
more progress today!
-sallie and divya resoldered the very very sketchy battery charger
-we went over the most recent/final [fingers crossed!] design. i am not the best person to describe it, so i will try to enlist anne to blog about it tomorrow. or i will, when i am more coherent.
-karlin got the gaming bridge/wireless to work! la la laaaaaa. i wasn't there but i can post details about that tomorrow. apparently it was like magic.
-we discovered that the joystick coordinates are seriously funky. the x axis runs from -1 to 1 from left to right, which makes sense. BUT the vertical axis runs -1 to 1 from top to bottom! that's super strange, but i guess just one of those first/labview things. i don't know if the picture helps, ignore all the periods, i just needed them for spacing
.........-1..........
-1 ...................1
............1..........
-motors actually run from -127 to 127. meaning that zero actually means STOP as opposed to fullspeedbackwards. i'm really excited about this.
-our super simple button code works more normally.
-nandini was researching materials for the brushes, belts, and tubes.
-anne was doing motor math!
thanks so much to karlin doug and jimmy for coming to the design review.
hopefully more updates from me tomorrow. and i'll try to bug someone to post pics to picasa! we have a sad lack of pictures this year.
-sallie and divya resoldered the very very sketchy battery charger
-we went over the most recent/final [fingers crossed!] design. i am not the best person to describe it, so i will try to enlist anne to blog about it tomorrow. or i will, when i am more coherent.
-karlin got the gaming bridge/wireless to work! la la laaaaaa. i wasn't there but i can post details about that tomorrow. apparently it was like magic.
-we discovered that the joystick coordinates are seriously funky. the x axis runs from -1 to 1 from left to right, which makes sense. BUT the vertical axis runs -1 to 1 from top to bottom! that's super strange, but i guess just one of those first/labview things. i don't know if the picture helps, ignore all the periods, i just needed them for spacing
.........-1..........
-1 ...................1
............1..........
-motors actually run from -127 to 127. meaning that zero actually means STOP as opposed to fullspeedbackwards. i'm really excited about this.
-our super simple button code works more normally.
-nandini was researching materials for the brushes, belts, and tubes.
-anne was doing motor math!
thanks so much to karlin doug and jimmy for coming to the design review.
hopefully more updates from me tomorrow. and i'll try to bug someone to post pics to picasa! we have a sad lack of pictures this year.
Monday, January 19, 2009
weekend of progress (continued)
i'm extremely tired/brain dead as of right now, so i apologize if this post doesn't make much sense...
basically, the updates/new rules that FIRST keeps giving us are extremely annoying because they always conflict with our chassis designs! :(
first, we wanted to shorten the chassis and have the output tube stick out a little so the moon balls would fall nicely into the trailer-- but then we found a rule saying that no part of the robot can stick out of the bumper perimeter. so that idea is...dead.
then we wanted to make the front slightly v-shaped so we could be 38" long but still get closer to the trailer-- but then we found a rule saying that all corners need to be covered by bumpers, and the minimum bumper length is 6". i think this idea may still work, even with the bumpers in the way... but we should make a rough, actual-sized prototype...
also, we've decided that for the input/picking-up-moon-balls-from-the-ground, we're going to use brushes instead of conveyor belts. the brushes will be better b/c they are stiff enough to push the moon balls into the robot, but also flexible so they won't get stuck in the holes in the moon balls.
we also realized that for the transition/lifting-moon-balls-to-the-tube, we can't use an up-conveyor belt in the back because apparently the moon ball will just bounce off the conveyor belt instead of going up like we want it to. so we are (tentatively) planning to use 2 up-conveyor belts on the sides controlled by one motor. (and so far we're assuming that we will still use surgical tubing).
our wonderful build minions :) also made a prototype of the output/tube-to-let-moon-balls-fall-into-trailer on saturday, and a human-controlled stopper to go with it.
hopefully i haven't forgotten anything...
and hopefully it somewhat makes sense.
but we'll cover all of this at the design review at 6 tomorrow!
see you guys there! :D
basically, the updates/new rules that FIRST keeps giving us are extremely annoying because they always conflict with our chassis designs! :(
first, we wanted to shorten the chassis and have the output tube stick out a little so the moon balls would fall nicely into the trailer-- but then we found a rule saying that no part of the robot can stick out of the bumper perimeter. so that idea is...dead.
then we wanted to make the front slightly v-shaped so we could be 38" long but still get closer to the trailer-- but then we found a rule saying that all corners need to be covered by bumpers, and the minimum bumper length is 6". i think this idea may still work, even with the bumpers in the way... but we should make a rough, actual-sized prototype...
also, we've decided that for the input/picking-up-moon-balls-from-the-ground, we're going to use brushes instead of conveyor belts. the brushes will be better b/c they are stiff enough to push the moon balls into the robot, but also flexible so they won't get stuck in the holes in the moon balls.
we also realized that for the transition/lifting-moon-balls-to-the-tube, we can't use an up-conveyor belt in the back because apparently the moon ball will just bounce off the conveyor belt instead of going up like we want it to. so we are (tentatively) planning to use 2 up-conveyor belts on the sides controlled by one motor. (and so far we're assuming that we will still use surgical tubing).
our wonderful build minions :) also made a prototype of the output/tube-to-let-moon-balls-fall-into-trailer on saturday, and a human-controlled stopper to go with it.
hopefully i haven't forgotten anything...
and hopefully it somewhat makes sense.
but we'll cover all of this at the design review at 6 tomorrow!
see you guys there! :D
weekend of progress
it's been quite a weekend - designing and mathing and redesigning and remathing and reredesigning... i think anne will be posting more details on that side of things.
but for programming/electronics - tobi and karlin spent some serious time with the crio/bridge/router/IP addresses/crossover cable and the wireless STILL won't work. we don't know why, and it's all very frustrating. however, we CAN download code and for now, that's good enough.
even downloading with the cable, we were having issues because we'd download code to the driver's station and it would work, la la la laaa, but then if you ever turned the system off it would forget that you'd downloaded code. so basically, you could never hit the kill switch. you had to redownload every time you turned the robot on. clearly, that's no good. after some searching on chief delphi, we found a workaround and it downloads normally now.
we also got an encoder up and running! sallie and divya wired up the encoder and between doug and karlin and labview's lovely pre-written code - it WORKS. the first day we try. wow.
just to test that we could do basic things, we added a simple case statement that was like "hey only do what you normally do if you're pressing the trigger on joystick 1". and it works, which is good because it's basically as simple as it gets.
we also discovered more stupid bumper rules today, leading to some redesigning. meh. anne will post more about all this?
DESIGN REVIEW TOMORROW (TUESDAY) AT 6:00. we hope all team members and mentors will be able to make it. as always, dinner provided.
sallie's fabulous grandparents in north carolina went on a walmart adventure and bought us 3 orbit balls! i'm really excited about this. :)
allie's been doing some amazing solidworks stuff. she doesn't seem to realize how great it is, but i do. :) we've talked so much talk about solidworks in previous years, it's great to actually sit down and do it.
thanks so much to all for their help this weekend - the bhats for food and chaperoning, the waleckas for chaperoning, il fornaio for some tasty tasty pizza, karlin, doug, david, and brian for their infinite support and wisdom. it was definitely a productive weekend.
hope to see you tomorrow at DESIGN REVIEW, 6PM.
the rest of the week is 5:15-8, as it has been.
27 days!
but for programming/electronics - tobi and karlin spent some serious time with the crio/bridge/router/IP addresses/crossover cable and the wireless STILL won't work. we don't know why, and it's all very frustrating. however, we CAN download code and for now, that's good enough.
even downloading with the cable, we were having issues because we'd download code to the driver's station and it would work, la la la laaa, but then if you ever turned the system off it would forget that you'd downloaded code. so basically, you could never hit the kill switch. you had to redownload every time you turned the robot on. clearly, that's no good. after some searching on chief delphi, we found a workaround and it downloads normally now.
we also got an encoder up and running! sallie and divya wired up the encoder and between doug and karlin and labview's lovely pre-written code - it WORKS. the first day we try. wow.
just to test that we could do basic things, we added a simple case statement that was like "hey only do what you normally do if you're pressing the trigger on joystick 1". and it works, which is good because it's basically as simple as it gets.
we also discovered more stupid bumper rules today, leading to some redesigning. meh. anne will post more about all this?
DESIGN REVIEW TOMORROW (TUESDAY) AT 6:00. we hope all team members and mentors will be able to make it. as always, dinner provided.
sallie's fabulous grandparents in north carolina went on a walmart adventure and bought us 3 orbit balls! i'm really excited about this. :)
allie's been doing some amazing solidworks stuff. she doesn't seem to realize how great it is, but i do. :) we've talked so much talk about solidworks in previous years, it's great to actually sit down and do it.
thanks so much to all for their help this weekend - the bhats for food and chaperoning, the waleckas for chaperoning, il fornaio for some tasty tasty pizza, karlin, doug, david, and brian for their infinite support and wisdom. it was definitely a productive weekend.
hope to see you tomorrow at DESIGN REVIEW, 6PM.
the rest of the week is 5:15-8, as it has been.
27 days!
Saturday, January 17, 2009
saturday
i will try to post again later/tomorrow but i am too brain dead right now to be coherent
but
TOMORROW IS A DAY OF REST - no robotics. enjoy.
monday we'll meet 4-8pm.
see you then!
but
TOMORROW IS A DAY OF REST - no robotics. enjoy.
monday we'll meet 4-8pm.
see you then!
1/16 [from sallie]
reposting since sallie didn't have access to the build blog last night.
So...I can't figure out how to post on the main blog so I am blogging here. Hi! This is Sallie(not to be confused with Allie). So today has been filled with more prototyping! After dinner we decided to begin to prototype some of our new ideas. We are afraid the windmill is going to get stuck or not work. Instead, we are thinking of using conveyor belts made out of surgical tubing. Annie, Shreya (did I spell that right), divya, and I started to prototype a conveyor belt. While grooving to some jack johnson music, we determined that rather than have circular pully/sticks/track/the thing that the belt goes on, a multi-faceted surface tended to grip the belt better. Basically, we took some 80/20 and put this scratchy sandpaper tape for extra friction and used surgical tubing for the belt. We also tried to saw/file the sides down to make sides; it didn't turn out to grippy enough. Finally, we got a prototype that kinda worked. Next, we ran a lap around the circle and came back to make a prototype out of the ball-put-er-out-er. We decided that we might need to make our base of our robot a little shorter in order to allow the put-er-out-er to sucessfully get the ball in the trailer. Oh! we got the trailer today! It is a work of art. We hopefully are getting 3 more orbit balls from north carolina! So other things that happened today: toby was being amazing and de-bugging or talking with the computers as others onlooked, others were designing or measuring or planning for the robot. Ida tried to take pictures for the website. Allie was using solid works. And we all were shooting our orbit ball into our new trailer. Fun Friday!
So...I can't figure out how to post on the main blog so I am blogging here. Hi! This is Sallie(not to be confused with Allie). So today has been filled with more prototyping! After dinner we decided to begin to prototype some of our new ideas. We are afraid the windmill is going to get stuck or not work. Instead, we are thinking of using conveyor belts made out of surgical tubing. Annie, Shreya (did I spell that right), divya, and I started to prototype a conveyor belt. While grooving to some jack johnson music, we determined that rather than have circular pully/sticks/track/the thing that the belt goes on, a multi-faceted surface tended to grip the belt better. Basically, we took some 80/20 and put this scratchy sandpaper tape for extra friction and used surgical tubing for the belt. We also tried to saw/file the sides down to make sides; it didn't turn out to grippy enough. Finally, we got a prototype that kinda worked. Next, we ran a lap around the circle and came back to make a prototype out of the ball-put-er-out-er. We decided that we might need to make our base of our robot a little shorter in order to allow the put-er-out-er to sucessfully get the ball in the trailer. Oh! we got the trailer today! It is a work of art. We hopefully are getting 3 more orbit balls from north carolina! So other things that happened today: toby was being amazing and de-bugging or talking with the computers as others onlooked, others were designing or measuring or planning for the robot. Ida tried to take pictures for the website. Allie was using solid works. And we all were shooting our orbit ball into our new trailer. Fun Friday!
Thursday, January 15, 2009
a very frustrating thursday
sigh. today [for programming/electronics] was one of those days where you work for hours, starting with a small problem, realizing it's a huge problem, thinking you'll never solve it. and, to make it all the worse, there WAS no problem to begin with. or at least, not the one we were trying to solve.
that's right - it was just tobi, me, and karlin late tonight when we tried to download the code again, after fiddling with IP addresses for a couple hours, and guess what? erin and caroline and i just didn't read the message correctly yesterday. that 34% it was stuck at was not 34-percent-downloaded. no no, it was finished downloading, it was happy. it had 34% free space. meaning - there was no problem to begin with, at least when downloading the way we were.
i think i am understandably frustrated by this realization - karlin, tobi, caroline, erin and i spent a ton of time tonight trying to understand IP addresses for the driver's station and the router and the bridge and the crio. and when it finally works? it's because it did all along. and we had just messed it up majorly in the middle in the processing of debugging.
granted, it only worked because we hard-downloaded it. the wireless still doesn't work, but that might be because we actually messed it up with all the reconfiguring and IP-address-messing. so tomorrow, we'll have to go back and undo all the stuff we did today and THEN see if the wireless works. i wrote us a note on the page karlin marked.
in other news, annie and sallie made an awesome visual representation of the trailer. that thing is HUGE!
we also discovered that the windmill design will likely not work, because it requires an enormous accuracy factor. thank you so much to those that made the [yes, another] prototype out of 80-20 and sheet metal - even if we may not end up using that design, that prototype definitely helped us to understand pros and cons of the design.
we are thinking of a conveyer belt concept involving surgical tubing. caroline made an ace run for some surgical tubing. i'm not sure what happened after that, to be honest. that's when i became consumed by pinging and replies and IP addresses.
an enormous thank you to karlin. after she discovered that HEY there was no problem to begin with, she only laughed instead of being annoyed we'd just wasted a boatload of time. so THANK YOU.
i guess it's officially robotics season.
we're meeting saturday 10-1, not on sunday, and monday at a time tba.
that's right - it was just tobi, me, and karlin late tonight when we tried to download the code again, after fiddling with IP addresses for a couple hours, and guess what? erin and caroline and i just didn't read the message correctly yesterday. that 34% it was stuck at was not 34-percent-downloaded. no no, it was finished downloading, it was happy. it had 34% free space. meaning - there was no problem to begin with, at least when downloading the way we were.
i think i am understandably frustrated by this realization - karlin, tobi, caroline, erin and i spent a ton of time tonight trying to understand IP addresses for the driver's station and the router and the bridge and the crio. and when it finally works? it's because it did all along. and we had just messed it up majorly in the middle in the processing of debugging.
granted, it only worked because we hard-downloaded it. the wireless still doesn't work, but that might be because we actually messed it up with all the reconfiguring and IP-address-messing. so tomorrow, we'll have to go back and undo all the stuff we did today and THEN see if the wireless works. i wrote us a note on the page karlin marked.
in other news, annie and sallie made an awesome visual representation of the trailer. that thing is HUGE!
we also discovered that the windmill design will likely not work, because it requires an enormous accuracy factor. thank you so much to those that made the [yes, another] prototype out of 80-20 and sheet metal - even if we may not end up using that design, that prototype definitely helped us to understand pros and cons of the design.
we are thinking of a conveyer belt concept involving surgical tubing. caroline made an ace run for some surgical tubing. i'm not sure what happened after that, to be honest. that's when i became consumed by pinging and replies and IP addresses.
an enormous thank you to karlin. after she discovered that HEY there was no problem to begin with, she only laughed instead of being annoyed we'd just wasted a boatload of time. so THANK YOU.
i guess it's officially robotics season.
we're meeting saturday 10-1, not on sunday, and monday at a time tba.
Wednesday, January 14, 2009
wednesday [at least for build]
hellooooooooooooooo :)
today was quite a productive day for build!
first, we went over our current overall design for the robot. for the input, we will have a "windmill" design that will push moon balls into the "U" of our u-shaped chassis. the moon balls will go up a little ramp, over this bump, and into this little "storage area" where we want to have space at least 2-3 moon balls. for the transition phase (or as divya likes to say, t-phase), we are planning to have a conveyor belt to carry the moon balls up to the output. for the output, we will have a tube that will lead to the front of the robot, where moon balls will be dropped into our opposing alliance's trailer! this tube will have a stopper to prevent moon balls from falling too early. we also wanted to make the chassis a bit shorter than 38" long so the tube could hang a little over the chassis, making it easier to drop moon balls into trailers.
we threw around some more ideas (such as using a spiral instead of a conveyor belt, and picking balls up with a gripper like a mini jack-the-gripper instead of using the windmill), but we decided that our current design is the best way to go (as of now).
then we ran into the slight (or not so slight) problem of dimensions. with both a windmill AND a conveyor belt, it seems hard to fit everything into our 38" x 28" footprint. anna had a cool idea of tilting the conveyor belt a little bit forward and having it turn in the opposite direction that we planned earlier. with anna's idea, the moon balls will be carried up the conveyor belt in the back of the robot (in other words, if you looked at the robot from his/her/its left side, the conveyor belt would be turning counterclockwise)... this is quite difficult to describe in words...i hope it makes sense.
so annie, divya, tobi, anna, nandini, allie, and i did some math and number crunching to figure out possible dimensions for the different parts of the robot. so far, we've come up with possible dimensions for the windmill, and allie made a uber awesome sketch on solidworks of the windmill with the right dimensions! (except...apparently something's funny with the angles...but that's fix-able).
it's hard to describe the dimensions, but i'll try:
(the windmill has 2...uh...wings...for lack of a better term...
ok yes i know that's not the right term but i honestly can't think of anything right now)
the angle of the wing is 120 degrees (we just assumed this for some reason...we could change this if necessary)
the length across the wing is 14" (which will fit in the "U" of our chassis)
the depth of the wing is 4"
the wing "halves" are 8" x 8" squares
the wings will be mounted 10" from the floor (this should give us enough ground clearance without being too far away from the floor...if i did my math correctly)
annie, divya, tobi, and anna also made a prototype/model of the windmill out of foamcore, pvc, and lots of duct tape with the right dimensions and angles! it's quite pretty. :)
we also have to think about how to mount the windmill (i think it'll be something like free willy on scotty) and possible motors (i need to find those motor specs)...
hooray for productivity! (^.^)
see you all tomorrow :)
-anne
today was quite a productive day for build!
first, we went over our current overall design for the robot. for the input, we will have a "windmill" design that will push moon balls into the "U" of our u-shaped chassis. the moon balls will go up a little ramp, over this bump, and into this little "storage area" where we want to have space at least 2-3 moon balls. for the transition phase (or as divya likes to say, t-phase), we are planning to have a conveyor belt to carry the moon balls up to the output. for the output, we will have a tube that will lead to the front of the robot, where moon balls will be dropped into our opposing alliance's trailer! this tube will have a stopper to prevent moon balls from falling too early. we also wanted to make the chassis a bit shorter than 38" long so the tube could hang a little over the chassis, making it easier to drop moon balls into trailers.
we threw around some more ideas (such as using a spiral instead of a conveyor belt, and picking balls up with a gripper like a mini jack-the-gripper instead of using the windmill), but we decided that our current design is the best way to go (as of now).
then we ran into the slight (or not so slight) problem of dimensions. with both a windmill AND a conveyor belt, it seems hard to fit everything into our 38" x 28" footprint. anna had a cool idea of tilting the conveyor belt a little bit forward and having it turn in the opposite direction that we planned earlier. with anna's idea, the moon balls will be carried up the conveyor belt in the back of the robot (in other words, if you looked at the robot from his/her/its left side, the conveyor belt would be turning counterclockwise)... this is quite difficult to describe in words...i hope it makes sense.
so annie, divya, tobi, anna, nandini, allie, and i did some math and number crunching to figure out possible dimensions for the different parts of the robot. so far, we've come up with possible dimensions for the windmill, and allie made a uber awesome sketch on solidworks of the windmill with the right dimensions! (except...apparently something's funny with the angles...but that's fix-able).
it's hard to describe the dimensions, but i'll try:
(the windmill has 2...uh...wings...for lack of a better term...
ok yes i know that's not the right term but i honestly can't think of anything right now)
the angle of the wing is 120 degrees (we just assumed this for some reason...we could change this if necessary)
the length across the wing is 14" (which will fit in the "U" of our chassis)
the depth of the wing is 4"
the wing "halves" are 8" x 8" squares
the wings will be mounted 10" from the floor (this should give us enough ground clearance without being too far away from the floor...if i did my math correctly)
annie, divya, tobi, and anna also made a prototype/model of the windmill out of foamcore, pvc, and lots of duct tape with the right dimensions and angles! it's quite pretty. :)
we also have to think about how to mount the windmill (i think it'll be something like free willy on scotty) and possible motors (i need to find those motor specs)...
hooray for productivity! (^.^)
see you all tomorrow :)
-anne
WEDNESDAY[at least programming]
i think anne will blog about build's amazing progress today, but i thought i'd give a short update of programming.
we continued to look through the labview stuff. the existing VIs that wpi has provided are amazing. as in, there's an existing timer. and a nice button you drag if you want interrupts. we're very excited about this. we spent a good amount of time just learning what VIs are preexisting for us [most of the ones we'll need, probably] and where they are.
we tried to learn how to download using the documentation that karlin found but it really didn't work. the computer got stuck at 34% and then it wouldn't continue "deploying" [that's what downloading's called.]
build, on the other hand, had a fabulously productive day. allie's solidworks skills are so awesome - she's got a model of the windmill design! and i know there was a lot of measuring and math-ing and prototyping to scale. the latest windmill prototype is beautiful, with measured angles and all!
that's the summary version - anne will provide details.
weekend timings to come.
thanks to annie's family for chaperoning and dinner!
we continued to look through the labview stuff. the existing VIs that wpi has provided are amazing. as in, there's an existing timer. and a nice button you drag if you want interrupts. we're very excited about this. we spent a good amount of time just learning what VIs are preexisting for us [most of the ones we'll need, probably] and where they are.
we tried to learn how to download using the documentation that karlin found but it really didn't work. the computer got stuck at 34% and then it wouldn't continue "deploying" [that's what downloading's called.]
build, on the other hand, had a fabulously productive day. allie's solidworks skills are so awesome - she's got a model of the windmill design! and i know there was a lot of measuring and math-ing and prototyping to scale. the latest windmill prototype is beautiful, with measured angles and all!
that's the summary version - anne will provide details.
weekend timings to come.
thanks to annie's family for chaperoning and dinner!
Tuesday, January 13, 2009
tuesday
today was another really productive day. annie, divya, tobi, anna, shreya and malaika all worked on making full scale prototypes of the scooper/windmill design as well as the conveyer belt. sallie caroline erin and i [along with karlin's expertise] looked through the control system code, going through the documentation and looking at the given labview code. we also tried to do some stuff with setting a gyro as a global, but i don't think it totally ended up working. obviously, we'll be working on this more, but i think we're all feeling fairly comfortable with the coding environment at the moment. we also talked about how to do the physics for motors for the conveyer belt [between erin, caroline, and nan's ap physics-ness, we should be in good shape!] and also started looking on mcmaster for different belts/rivet fasteners etc. allie and tanya did some amazing solidworks stuff! there's a great model of a u-shaped chassis so far. it's pretty - we're all really excited about the solidworks. :) tomorrow allie plans to model up the tower/conveyer belt concept, and then tanya will be able to polish it on thursday.
sad news - the orbit balls we had on hold with our pal in chico were bought! so now we're once again on the lookout for more balls. i think we're all contacting relatives around the country to see if someone can pick some up from a walmart, preferably somewhere with few FIRST teams.
see you tomorrow!
sad news - the orbit balls we had on hold with our pal in chico were bought! so now we're once again on the lookout for more balls. i think we're all contacting relatives around the country to see if someone can pick some up from a walmart, preferably somewhere with few FIRST teams.
see you tomorrow!
Monday, January 12, 2009
monday!
we're baaaaack! and i think i speak for all the juniors when i say how impressed i am with the amount of stuff we've/you've gotten done in the past week. wow. the number of prototypes is incredible, the driving-benji-with-the-kit-wheels... it was quite a day.
where to start?
driving benji on the slippery surface was better than expected. he drives/turns roughly as well as last year. the only major problems are that it's really really staticky and does not have a great stopping time. we're trying to think of coding things we can do to counteract it. also, it's super easy to push him around when he's stopped.
we've broken the challenge into three parts - input, transition, and output. input is how we scoop up the cells, transition is moving them, and output is depositing them in the trailers of other robots.
-divya presented her windmill/funnel concept for the input. i think we'll end up using something like this. allie took pictures, so we'll hopefully have those on picasa soon.
-annie c showed the conveyer belt for transition, as well as a corkscrew-type thing for moving the balls up. we'll probably end up using a conveyer belt, if possible.
-sallie showed another conveyer belt concept, this one horizontal
-tobi and anna showed a sort of movie-reel idea for output. basically, the cell comes down a tube, and there's a platform with cutouts that spins. on the other side is corresponding hole, and the cell drops into the other robots trailer. i know that made little sense, but hopefully we'll have pictures to share soon.
-anna and shreya showed another windmill design for scooping/input.
-divya showed her tube/ramp output concept. it has a blocker so there'd be a button on the joystick for release.
we also went over a feasible calendar for season that we'll try very very hard to stick to.
week of 1/12 - design week
1/18 - design chosen
week of 1/18 - build chassis
1/25 - chassis built
1/30 - breathing day aka no robotics
2/5 - drive code finished [this is the big programming deadline]
2/6 - breathing day #2 [fomf]
2/8 - tower built
2/10 - name chosen :)
2/12 - rough tower code
2/15 - real tower code
2/17 - SHIP
some decisions we made
-we're going down to size 25 chain. we currenly use 35
-probably using same general chassis idea, although make it U-shaped so we can better load balls. we'll be going long, rather than fat.
-currently planning a windmill --> conveyer belt --> output design. we'll be further prototyping and drawing to scale in the next week. allie and tanya are working on solidworks designs.
-anne will be the picasa girl again
-for mentors: karlin made sure that the gmail calendar is all set up, so if we can use that to know when mentors will be available that would be great!
a big thank you to karlin and tanya for their time today, and to annie's mom for chaperoning and food.
this week we'll be meeting roughly 5:15 - 8. hope to see you then!
where to start?
driving benji on the slippery surface was better than expected. he drives/turns roughly as well as last year. the only major problems are that it's really really staticky and does not have a great stopping time. we're trying to think of coding things we can do to counteract it. also, it's super easy to push him around when he's stopped.
we've broken the challenge into three parts - input, transition, and output. input is how we scoop up the cells, transition is moving them, and output is depositing them in the trailers of other robots.
-divya presented her windmill/funnel concept for the input. i think we'll end up using something like this. allie took pictures, so we'll hopefully have those on picasa soon.
-annie c showed the conveyer belt for transition, as well as a corkscrew-type thing for moving the balls up. we'll probably end up using a conveyer belt, if possible.
-sallie showed another conveyer belt concept, this one horizontal
-tobi and anna showed a sort of movie-reel idea for output. basically, the cell comes down a tube, and there's a platform with cutouts that spins. on the other side is corresponding hole, and the cell drops into the other robots trailer. i know that made little sense, but hopefully we'll have pictures to share soon.
-anna and shreya showed another windmill design for scooping/input.
-divya showed her tube/ramp output concept. it has a blocker so there'd be a button on the joystick for release.
we also went over a feasible calendar for season that we'll try very very hard to stick to.
week of 1/12 - design week
1/18 - design chosen
week of 1/18 - build chassis
1/25 - chassis built
1/30 - breathing day aka no robotics
2/5 - drive code finished [this is the big programming deadline]
2/6 - breathing day #2 [fomf]
2/8 - tower built
2/10 - name chosen :)
2/12 - rough tower code
2/15 - real tower code
2/17 - SHIP
some decisions we made
-we're going down to size 25 chain. we currenly use 35
-probably using same general chassis idea, although make it U-shaped so we can better load balls. we'll be going long, rather than fat.
-currently planning a windmill --> conveyer belt --> output design. we'll be further prototyping and drawing to scale in the next week. allie and tanya are working on solidworks designs.
-anne will be the picasa girl again
-for mentors: karlin made sure that the gmail calendar is all set up, so if we can use that to know when mentors will be available that would be great!
a big thank you to karlin and tanya for their time today, and to annie's mom for chaperoning and food.
this week we'll be meeting roughly 5:15 - 8. hope to see you then!
Saturday, January 10, 2009
Day 8
Today we continued working on prototypes. We made a "corkscrew" prototype, a windmill prototype, a "gumball machine" prototype, and another conveyor belt prototype. Then, we presented our prototypes to the group, and talked about how they could work together as a system. We also talked about using no more than four motors in the final tower design. This year, chassis design and tower design are inextricably tied, so we need to make decisions soon regarding our tower design.
Tomorrow we will be meeting from 2-4:30 (ending a bit earlier)
Tomorrow we will be meeting from 2-4:30 (ending a bit earlier)
Friday, January 09, 2009
Day 7
Today we finished what we had been working on yesterday, mainly installing software on computers (thanks again Sallie and Brian) and prototyping. We made lots of prototypes today out of all sorts of materials. Shreya and Anna made a very nice vertical conveyer belt system, and Divya and Annie worked on a horizontal windmill (it actually spins!). Our goal for this weekend is to have lots of nice prototypes to demonstrate to the leads during the meeting on Monday.
The Agenda for Monday's Meeting is as follows:
-Show the challenge video
-Go over challenge (questions, clarifications etc.)
-Go over schedule for the season
-Show Benji with this year's wheels on the competition surface (will he turn?)
-Present Prototypes
We would love if mentors would be able to attend, but we want to do the meeting early enough so that the Juniors can get some work done after the meeting, and early enough so some mentors can attend. Basically, we want to have an all-team meeting before we all go off and work.
Another note, Jimmy finished replacing the wheels on last year's robot with the wheels from this year's kop, so we would love a volunteer to pick up the robot from IDEO at a time tbd (I'm not sure when Jimmy will be there/ we can get into the shop to pick it up). However, it would be great it we could get it before/on Monday so that we can present it at the meeting. Thanks for a great first week of robotics.
Meeting times for this week and Monday are as follows:
Saturday :2-6
Sunday: 2-5
Monday: 3-6 (with the meeting beginning at 3)
Thursday, January 08, 2009
day 6
Today was another big day of prototyping and setup. Sallie downloaded the FIRST version of labview on Zak (no small feat) and worked on getting the computers ready for programming to start. We still need to finish installation on Mark, but Sallie started that, so we are well on our way.
In terms of prototypes, the team worked on making a conveyer belt (as that is a key aspect of many of our designs) and wrote up a pro con list of some of our current prototypes. We are hoping to have many functional prototypes for our all-team meeting this Monday. We haven't chosen a definite time for the meeting, but it will probably be in the 6:00- 6:30 range (so that mentors can attend). At this meeting we will be briefing the juniors on what we have been doing this week, showing them our prototypes, and presenting a detailed season schedule. Our first big deadline is in a little over a week. By next Sunday we hope to have chosen designs for both the chassis and tower.
Tomorrow we will be meeting from 5-8, Saturday from 2-6, and Sunday from 2-5. I will post the Monday meeting time as soon as I know.
Day 5
So, on Wednesday we did some more brainstorming and started to work on the bumpers for the trailer. However, our staple gun skills were less than stellar, so Anna's dad is going to finish the construction of the bumpers tonight to free the students up for brainstorming and prototyping.
Last night we also met Tanya (our new mentor from abbott labs). She brought some really cool stents for us to look at (one that maintains its shape and another that does not). She is really good at CAD, which should be great for our team. This past year the Cardinal's helped us set up computers with solidworks, so tonight Tanya will be showing us how to do some of that.
Yesterday we also dropped off last year's robot at IDEO so that we could switch out the wheels. Since Benji is stil operational, we are going to see how effective last year's chassis design and wheel configuration is with this year's wheels.
Divya and Tobi got the team number to display on the driver station, which brings us closer to finishing setting up the new control system.
Thanks to the mentors, students, and parents who have made these past few days run so smoothly!
Last night we also met Tanya (our new mentor from abbott labs). She brought some really cool stents for us to look at (one that maintains its shape and another that does not). She is really good at CAD, which should be great for our team. This past year the Cardinal's helped us set up computers with solidworks, so tonight Tanya will be showing us how to do some of that.
Yesterday we also dropped off last year's robot at IDEO so that we could switch out the wheels. Since Benji is stil operational, we are going to see how effective last year's chassis design and wheel configuration is with this year's wheels.
Divya and Tobi got the team number to display on the driver station, which brings us closer to finishing setting up the new control system.
Thanks to the mentors, students, and parents who have made these past few days run so smoothly!
Tuesday, January 06, 2009
day 4
Today was a pretty successful day. We dropped off the trailer material for Jimmy at IDEO (thanks to Marsha), did some more brainstorming and prototyping, installed some software, worked on the calendar, and worked on setting up the wireless connection for the cRIO (thanks Tobi, Divya and Mr. Amos).
Brainstorming and prototyping went well. We came up with the idea of using a windmill/waterwheel like structure to pick up balls from the floor and dump them into a chute that could hold them back until they could be released into an opposing team's trailer. Shreya and Anna began prototyping that design, but we need to do some more work on that before we will be able to tell if . We are planning on having an all-team meeting on the Monday that the leads return so that we can present our current prototypes and go over the schedule that we have created.
Karlin was here tonight from 5-8, and will be here again on Thursday at the same time. Tomorrow we're excited about meeting our new mentor Tanya from Abbott Labs. Meetings will be from 5-8 tomorrow and Thursday. Please try to read the manual when you can. Thanks for another great night!
Brainstorming and prototyping went well. We came up with the idea of using a windmill/waterwheel like structure to pick up balls from the floor and dump them into a chute that could hold them back until they could be released into an opposing team's trailer. Shreya and Anna began prototyping that design, but we need to do some more work on that before we will be able to tell if . We are planning on having an all-team meeting on the Monday that the leads return so that we can present our current prototypes and go over the schedule that we have created.
Karlin was here tonight from 5-8, and will be here again on Thursday at the same time. Tomorrow we're excited about meeting our new mentor Tanya from Abbott Labs. Meetings will be from 5-8 tomorrow and Thursday. Please try to read the manual when you can. Thanks for another great night!
Monday, January 05, 2009
days 2 and 3 of the build season
We have been working on finishing setting up the control system and brainstorming robot designs.
Yesterday (with the help of the amazing Karlin) we finished the bulk of the setup of the new control system. When we finally turned it on, we got lots of blinky green lights (something that rarely happens in robotics when you first turn something on). Doug bought us an AMAZING printer (probably the nicest in the whole school...) as well as some other goodies (3 types of wire strippers, heat shrink etc.).
Today we worked on finishing the control system testing. We almost finished (the motors do everything they are supposed to do when they are supposed to do it!). All we have left is setting up the wireless system (new this year with the new control system). We also did some more brainstorming. One of our ideas involved conveyer belts to draw the balls up and hold them for dumping into other teams' trailers. We also prototyped some other designs (hook and Doug's "salad bowl" idea") The hook didn't work very well, but the salad bowls were a promising gripper. Our concern is that the salad bowls might not be able to deal with high enough volumes of balls. This would make it hard to score many points with the moon rocks (2 points ea), but would be good for the final 20 second period when we need to place the super cell in the trailer of an opposing team.
We are also planning on replacing the mecanum wheels from last year's robot with the kit wheels from this year's kop to see what driving is like. Marsha picked up the competition floor material (very slippery!) so we can drive on that to see what it's like.
That's all for tonight. Tomorrow Tobi and Divya are starting at 3:00 and I will be there around 4:45.( I am dropping off materials at IDEO for the trailer) If you would like to help Tobi and Divya please join them at 3:00, if not, please plan on attending at 4:45.
Yesterday (with the help of the amazing Karlin) we finished the bulk of the setup of the new control system. When we finally turned it on, we got lots of blinky green lights (something that rarely happens in robotics when you first turn something on). Doug bought us an AMAZING printer (probably the nicest in the whole school...) as well as some other goodies (3 types of wire strippers, heat shrink etc.).
Today we worked on finishing the control system testing. We almost finished (the motors do everything they are supposed to do when they are supposed to do it!). All we have left is setting up the wireless system (new this year with the new control system). We also did some more brainstorming. One of our ideas involved conveyer belts to draw the balls up and hold them for dumping into other teams' trailers. We also prototyped some other designs (hook and Doug's "salad bowl" idea") The hook didn't work very well, but the salad bowls were a promising gripper. Our concern is that the salad bowls might not be able to deal with high enough volumes of balls. This would make it hard to score many points with the moon rocks (2 points ea), but would be good for the final 20 second period when we need to place the super cell in the trailer of an opposing team.
We are also planning on replacing the mecanum wheels from last year's robot with the kit wheels from this year's kop to see what driving is like. Marsha picked up the competition floor material (very slippery!) so we can drive on that to see what it's like.
That's all for tonight. Tomorrow Tobi and Divya are starting at 3:00 and I will be there around 4:45.( I am dropping off materials at IDEO for the trailer) If you would like to help Tobi and Divya please join them at 3:00, if not, please plan on attending at 4:45.
kickoff (sorry this is a little late)
(written by divya)
Today was kickoff, and we found what we had been waiting for so long: the challenge. The challenge, called Lunacy (named based on its moon theme), entails the robots dropping moon rocks, hollow teflon-covered balls, into opponent robots' attached trailers. In a section of the competition, one of us human Gatorbotics members has the opportunity to throw moon rocks into the opponent robots' trailers, too. We better hope one of us has hidden hoops skills, or as Tobi said, practice when we're stressed. After Erin, Tobi, and I attended kickoff to pick up the kit and discover the challenge, we returned and in the Choral Room, Erin shared the information with the rest of the team (well, a critical part: JUNIORS: of the team is on the other side of the world right now =[ ). Aside from introducing Doug and Jimmy to the new freshmen, we all met Brian, a new mentor. We then went on to the fabulous new robotics room to brainstorm ideas for this year's challenge, inventory everything in the kit of parts (all 27 pages of the checklist), and fix tape on/wires (splicing took quite a while for Tobi, Shreya, Anna, and me, but we managed =D ) of the batteries.
Here is the challenge video:
http://robotics.nasa.gov/events/2009_frcwebcasts.php
Here is the like to this year's manual:
http://www.usfirst.org/community/frc/content.aspx?id=452
I would plan on reading sections 7-10
Today was kickoff, and we found what we had been waiting for so long: the challenge. The challenge, called Lunacy (named based on its moon theme), entails the robots dropping moon rocks, hollow teflon-covered balls, into opponent robots' attached trailers. In a section of the competition, one of us human Gatorbotics members has the opportunity to throw moon rocks into the opponent robots' trailers, too. We better hope one of us has hidden hoops skills, or as Tobi said, practice when we're stressed. After Erin, Tobi, and I attended kickoff to pick up the kit and discover the challenge, we returned and in the Choral Room, Erin shared the information with the rest of the team (well, a critical part: JUNIORS: of the team is on the other side of the world right now =[ ). Aside from introducing Doug and Jimmy to the new freshmen, we all met Brian, a new mentor. We then went on to the fabulous new robotics room to brainstorm ideas for this year's challenge, inventory everything in the kit of parts (all 27 pages of the checklist), and fix tape on/wires (splicing took quite a while for Tobi, Shreya, Anna, and me, but we managed =D ) of the batteries.
Here is the challenge video:
http://robotics.nasa.gov/events/2009_frcwebcasts.php
Here is the like to this year's manual:
http://www.usfirst.org/community/frc/content.aspx?id=452
I would plan on reading sections 7-10
Friday, January 02, 2009
it's about that time
it's been a while - kickoff is TOMORROW, saturday january 3rd. as usual, we'll be meeting at castilleja in the choral room at 11:30. please come to watch the animation, brainstorm challenge solutions, unpack kit of parts, etc.
as most of you know, the juniors are in china for the next week! we'll be checking email and eagerly awaiting news of the challenge. we're back on the 11th.
i've been remiss in blogging this fall, but summary version - we ran a blinky bug workshop, the programmers had our first-ever independent study, meaning we were able to have specific robotics-related worktime during the school day. we learned a ton about labview and were just generally more organized. there was an allen steel run, we showed off benji to the school several times... it was a good fall.
and, oh yeah, we have NEW SPACE! we're now in the lower level of arrillaga and have both an office and a larger room. come check it out :)
the new control system arrived during finals, meaning we only really got to work with it once. but we inventoried everything and started to bench test, though didn't get as far as we'd hoped. i'm hoping by the time all the juniors are back from china, you'll all be experts :)
okay that's all i've got for now. see you when we're back!
as most of you know, the juniors are in china for the next week! we'll be checking email and eagerly awaiting news of the challenge. we're back on the 11th.
i've been remiss in blogging this fall, but summary version - we ran a blinky bug workshop, the programmers had our first-ever independent study, meaning we were able to have specific robotics-related worktime during the school day. we learned a ton about labview and were just generally more organized. there was an allen steel run, we showed off benji to the school several times... it was a good fall.
and, oh yeah, we have NEW SPACE! we're now in the lower level of arrillaga and have both an office and a larger room. come check it out :)
the new control system arrived during finals, meaning we only really got to work with it once. but we inventoried everything and started to bench test, though didn't get as far as we'd hoped. i'm hoping by the time all the juniors are back from china, you'll all be experts :)
okay that's all i've got for now. see you when we're back!
Thursday, June 12, 2008
CAMP - JULY 12-13!
from em's email:
Hello!
After a first pass at an agenda for Gatorbotics Bootcamp, I thought I'd share this with you (especially since I sort of volunteered all of you to help out in some way at some point). I know that some of you may be out during this time (i.e. David Cardinal) but if you can still help us prepare, for camp on July 12-13, please let us know.
Jessa, Karlin and I decided on a two day bootcamp which is more doable given our tight schedules this summer. We also want a lot more student and parent involvement, if possible (so we don't bear all the load) and we'd like to incorporate a number of non-technical aspects like project planning and public speaking type activities.
The brief agenda is below. I've attached a long winded version with a first pass description of what I think each session should entail with questions. Note that this is definitely a very very first pass so please feel free to chop at it. I think I've realized that we need something to glue together all the technical aspects of robot building - and hence starting with a system level discussion and state diagrams. I think, given how much energy us mentors and parents have, our time together is best spent looking at the big picture rather than diving into the mechanics of Solidworks or something like that . . . since Solidworks, and even Labview have tutorials that, if we can get the students motivated, they can do on their own.
I'm out to Singapore and Japan from June 15 - July 11 for work. Yes, that means I need your help preparing for bootcamp since I get back the day before! I'll be on skype and email the entire time I'm there.
Please email me with a yay or nay if you can help, and with your feedback.
Many many thanks in advance,
Emily
* * * * * * * * * * * * *
Draft Agenda: Brief Version
Saturday, July 12
8:45 Introductions / Breakfast (Emily)
9:00 The Big Picture: Building a Calendar Together (Erin)
10:30 Kit of Parts Scavenger Hunt and Discussion (Sherri, Allie)
12:00 Lunch break / Fieldtrip Slideshow (Erin and Emily)
1:00 Brains, brains, brains: Robot State Diagrams (Karlin / Jessa, Sherri / Caroline)
2:30 Starting Virtual: Introduction to the Labview environment via NXT (Karlin / David C)
4:00 Realizing the Virtual: Part 1: Real sensors (Jessa, Doug, David Cardinal)
5:00 Day Ends
Sunday, July 13
8:45 Breakfast Reflections (Emily)
9:00 Your Elevator Pitch: Team values and presenting them (Karl / Farokh, Allison / Ida)
10:30 Realizing the Virtual: Part 2: Motors and Mechanisms (David Lu / Nandini / Ann)
12:00 Lunch break. Commitment Discussion. (Erin)
1:00 Show and tell: What you always wanted to know how to use!
2:00 Putting it all together: Sensors, Actuators and Code (Maybe Emily)
4:00 What next? Putting together a game plan.
5:00 Day Ends
(check the email for more detailed agenda)
Hello!
After a first pass at an agenda for Gatorbotics Bootcamp, I thought I'd share this with you (especially since I sort of volunteered all of you to help out in some way at some point). I know that some of you may be out during this time (i.e. David Cardinal) but if you can still help us prepare, for camp on July 12-13, please let us know.
Jessa, Karlin and I decided on a two day bootcamp which is more doable given our tight schedules this summer. We also want a lot more student and parent involvement, if possible (so we don't bear all the load) and we'd like to incorporate a number of non-technical aspects like project planning and public speaking type activities.
The brief agenda is below. I've attached a long winded version with a first pass description of what I think each session should entail with questions. Note that this is definitely a very very first pass so please feel free to chop at it. I think I've realized that we need something to glue together all the technical aspects of robot building - and hence starting with a system level discussion and state diagrams. I think, given how much energy us mentors and parents have, our time together is best spent looking at the big picture rather than diving into the mechanics of Solidworks or something like that . . . since Solidworks, and even Labview have tutorials that, if we can get the students motivated, they can do on their own.
I'm out to Singapore and Japan from June 15 - July 11 for work. Yes, that means I need your help preparing for bootcamp since I get back the day before! I'll be on skype and email the entire time I'm there.
Please email me with a yay or nay if you can help, and with your feedback.
Many many thanks in advance,
Emily
* * * * * * * * * * * * *
Draft Agenda: Brief Version
Saturday, July 12
8:45 Introductions / Breakfast (Emily)
9:00 The Big Picture: Building a Calendar Together (Erin)
10:30 Kit of Parts Scavenger Hunt and Discussion (Sherri, Allie)
12:00 Lunch break / Fieldtrip Slideshow (Erin and Emily)
1:00 Brains, brains, brains: Robot State Diagrams (Karlin / Jessa, Sherri / Caroline)
2:30 Starting Virtual: Introduction to the Labview environment via NXT (Karlin / David C)
4:00 Realizing the Virtual: Part 1: Real sensors (Jessa, Doug, David Cardinal)
5:00 Day Ends
Sunday, July 13
8:45 Breakfast Reflections (Emily)
9:00 Your Elevator Pitch: Team values and presenting them (Karl / Farokh, Allison / Ida)
10:30 Realizing the Virtual: Part 2: Motors and Mechanisms (David Lu / Nandini / Ann)
12:00 Lunch break. Commitment Discussion. (Erin)
1:00 Show and tell: What you always wanted to know how to use!
2:00 Putting it all together: Sensors, Actuators and Code (Maybe Emily)
4:00 What next? Putting together a game plan.
5:00 Day Ends
(check the email for more detailed agenda)
Monday, May 26, 2008
updated camp information
from karlin's email:
Hello Team 1700,
We apologize for the late response in getting you some of the details settled for bootcamp this summer. Emily, Jessa and I have been working out our schedules and trying to find a time when we're all available. We'll let you know when that will be. soon. we swear.
A few important points:
1. We've decided to change bootcamp this summer. Instead of a full week of robotics camp, we've decided that 2-3 days of activities spread over two different weekends will work better. In addition to simplifying logistics, we're hoping that the time between sessions will create a better opportunity for the girls to spend some time working on new projects this summer! (Don't worry, we have plenty of ideas.)
2. We'd like to have the team leads assist us by taking on some of the responsibility of sharing what they've learned with their peers for a portion of bootcamp. We believe that teaching is one of the best ways we can help the girls learn, and we'll be here to help and guide them.
3. To help prepare all of this, we'd like to have that debriefing session with the team leads to wrap up reflections on this past season and discuss what we're going to focus on this summer.
Great! So what do we need from you?
Fill out the new weekend doodle! http://www.doodle.ch/v7p9xmfqwn87i2fa
Team leads- we'll be touch again soon to set up a date for the debrief, so start thinking about this season and how you might teach your peers. What are topics you think are critical for someone to know to build a robot? What were activities or "lectures" you found particularly memorable or useful (not just from bootcamp, but from the past 2/3 years): what did you learn from it and why do you think it was memorable?
Team members- If you have special topics you're interested in learning about, don't be afraid to share your ideas with us.
If anyone has any questions or concerns, please let us know.
Let's keep the momentum going for the summer :)
-Emily, Jessa, and Karlin
Hello Team 1700,
We apologize for the late response in getting you some of the details settled for bootcamp this summer. Emily, Jessa and I have been working out our schedules and trying to find a time when we're all available. We'll let you know when that will be. soon. we swear.
A few important points:
1. We've decided to change bootcamp this summer. Instead of a full week of robotics camp, we've decided that 2-3 days of activities spread over two different weekends will work better. In addition to simplifying logistics, we're hoping that the time between sessions will create a better opportunity for the girls to spend some time working on new projects this summer! (Don't worry, we have plenty of ideas.)
2. We'd like to have the team leads assist us by taking on some of the responsibility of sharing what they've learned with their peers for a portion of bootcamp. We believe that teaching is one of the best ways we can help the girls learn, and we'll be here to help and guide them.
3. To help prepare all of this, we'd like to have that debriefing session with the team leads to wrap up reflections on this past season and discuss what we're going to focus on this summer.
Great! So what do we need from you?
Fill out the new weekend doodle! http://www.doodle.ch/v7p9xmfqwn87i2fa
Team leads- we'll be touch again soon to set up a date for the debrief, so start thinking about this season and how you might teach your peers. What are topics you think are critical for someone to know to build a robot? What were activities or "lectures" you found particularly memorable or useful (not just from bootcamp, but from the past 2/3 years): what did you learn from it and why do you think it was memorable?
Team members- If you have special topics you're interested in learning about, don't be afraid to share your ideas with us.
If anyone has any questions or concerns, please let us know.
Let's keep the momentum going for the summer :)
-Emily, Jessa, and Karlin
Friday, March 28, 2008
as copied from david cardinal's email
Thanks everyone for a great session this morning. You guys got everything done we had on the list and then some.
Special thanks to Steve T. & David B. for getting the SolidWorks licenses in record time and to Lanre for setting up the printer!
My notes:
· The 2 new HP/Compaq laptops are now full set up with Solidworks, the programming tools & eDrawings & Office and ready to go!
· 4 of the IBM Laptops are set up with the programming tools, Office & eDrawings, matching power adapters and are ready to go. 3 of them have also been upgraded to 1.5GB of RAM memory. The 4th (Debbie) could be upgraded for about $50 if needed.
· 2 of the IBM Laptops were donated to Kyle Barriger & Middle School Robotics “permanently” to simplify laptop management
· The 3 Animation laptops were already all set with 3DS, but none of them have Office, and all of them could use a memory upgrade (from 1GB to 2GB) and possibly a hard drive before they get used for next season. 3DS also crashes on one of them, but unless we need all three it’s probably not worth worrying about.
· The HP printer is set up and working on Thor with full ink cartridges, but I don’t think there are spares.
· Thor (the Desktop) is pretty lame as machines go, but now has eDrawings. If it is needed for Solidworks it should probably be replaced with something newer rather than trying to upgrade it. Otherwise it’s fine for basic email/Office/Print/eDrawings.
· All the machine status sheets are in a notebook on the bookshelf.
· Install disks & other CDs are now in a CD holder
· All the notebooks are labeled, with labeled adapters and in labeled computer cases. Quite an impressive stack actually!
Hopefully you guys are now in good shape going forward. Obviously you’ll want some more copies of Solidworks once you decide what other machines you want it on. The good news is that the new version worked fine and doesn’t require a dongle which simplifies things.
--David
Special thanks to Steve T. & David B. for getting the SolidWorks licenses in record time and to Lanre for setting up the printer!
My notes:
· The 2 new HP/Compaq laptops are now full set up with Solidworks, the programming tools & eDrawings & Office and ready to go!
· 4 of the IBM Laptops are set up with the programming tools, Office & eDrawings, matching power adapters and are ready to go. 3 of them have also been upgraded to 1.5GB of RAM memory. The 4th (Debbie) could be upgraded for about $50 if needed.
· 2 of the IBM Laptops were donated to Kyle Barriger & Middle School Robotics “permanently” to simplify laptop management
· The 3 Animation laptops were already all set with 3DS, but none of them have Office, and all of them could use a memory upgrade (from 1GB to 2GB) and possibly a hard drive before they get used for next season. 3DS also crashes on one of them, but unless we need all three it’s probably not worth worrying about.
· The HP printer is set up and working on Thor with full ink cartridges, but I don’t think there are spares.
· Thor (the Desktop) is pretty lame as machines go, but now has eDrawings. If it is needed for Solidworks it should probably be replaced with something newer rather than trying to upgrade it. Otherwise it’s fine for basic email/Office/Print/eDrawings.
· All the machine status sheets are in a notebook on the bookshelf.
· Install disks & other CDs are now in a CD holder
· All the notebooks are labeled, with labeled adapters and in labeled computer cases. Quite an impressive stack actually!
Hopefully you guys are now in good shape going forward. Obviously you’ll want some more copies of Solidworks once you decide what other machines you want it on. The good news is that the new version worked fine and doesn’t require a dongle which simplifies things.
--David
Tuesday, March 18, 2008
computers!
there are two, beautiful, brand spanking new hp laptops.
they are GORGEOUS.
think of laptop names. (g & h)
we should do something nice for the tech department and also jrock for getting them for us.
also, what are we doing with annie/bonnie/casey/debbie/emily/francey (whoa, they're all ee endings...)
can we just give a couple permanently to barriger so we don't have to worry about sharing them with him?
i'm going to work on getting mplab installed, and i think allie wanted to get solidworks up and running for next year.
ideo people are coming on thursday. :)
yay!
they are GORGEOUS.
think of laptop names. (g & h)
we should do something nice for the tech department and also jrock for getting them for us.
also, what are we doing with annie/bonnie/casey/debbie/emily/francey (whoa, they're all ee endings...)
can we just give a couple permanently to barriger so we don't have to worry about sharing them with him?
i'm going to work on getting mplab installed, and i think allie wanted to get solidworks up and running for next year.
ideo people are coming on thursday. :)
yay!
Sunday, March 16, 2008
from emily's email
Yes, I know we've barely had a breather after a very exciting season but parents and students alike are asking about this!
Let's try to nail a preliminary date before April 15.
Please let us know what weeks (Monday through Friday, 9 am - 5 pm) you are available between June 16 and August 25.
Please sign up on doodle! http://www.doodle.ch/participation.html?pollId=w7gwxeqiatazggkg
Jessa Lee (Gatorbotics founding team captain) and Karlin Bark (Stanford PhD student) spearheaded this amazing effort last year.
We talked about topics ranging from mechanisms to programming, took field trips to Alan Steel and the Tech Shop, and prototyped with pneumatics and electronics.
Photographs from the 2007 Gatorbotics bootcamp are here: http://picasaweb.google.com/castilleja.robotics/CampGatorbotics
Let's build on this foundation! I would love to hear from you thoughts on what we could do to make this even better.
A few thoughts:
- Could the entire team take a day to take a class in machining / welding at the TechShop or The Crucible during this week?
- Could the parents have their own parallel 'bootcamp' day or evening where they help the team behind the scenes and plan for the next year?
- Could we bring in guest speakers from other teams and go visit other local robotics teams i.e. Paly, Gunn and Woodside Claremont.
Mentors, teachers and parents, please also put down your own name if you want to get involved with this week. I'm not expecting anyone (myself included) to be available for the whole week to teach, but if we can each contribute a day or even an afternoon of our time, this will be fabulous once again!
Thanks in advance, Emily
Let's try to nail a preliminary date before April 15.
Please let us know what weeks (Monday through Friday, 9 am - 5 pm) you are available between June 16 and August 25.
Please sign up on doodle! http://www.doodle.ch/participation.html?pollId=w7gwxeqiatazggkg
Jessa Lee (Gatorbotics founding team captain) and Karlin Bark (Stanford PhD student) spearheaded this amazing effort last year.
We talked about topics ranging from mechanisms to programming, took field trips to Alan Steel and the Tech Shop, and prototyped with pneumatics and electronics.
Photographs from the 2007 Gatorbotics bootcamp are here: http://picasaweb.google.com/castilleja.robotics/CampGatorbotics
Let's build on this foundation! I would love to hear from you thoughts on what we could do to make this even better.
A few thoughts:
- Could the entire team take a day to take a class in machining / welding at the TechShop or The Crucible during this week?
- Could the parents have their own parallel 'bootcamp' day or evening where they help the team behind the scenes and plan for the next year?
- Could we bring in guest speakers from other teams and go visit other local robotics teams i.e. Paly, Gunn and Woodside Claremont.
Mentors, teachers and parents, please also put down your own name if you want to get involved with this week. I'm not expecting anyone (myself included) to be available for the whole week to teach, but if we can each contribute a day or even an afternoon of our time, this will be fabulous once again!
Thanks in advance, Emily
Saturday, March 15, 2008
svr results!
summary version:
WE WON THE JUDGES AWARD! that's really exciting
and we also got the safety token count award thing. yay for allie's safety captaining.
in more detail, friday afternoon we had a team meeting and discussed how we were doing. no, we weren't ranked high. with our gripper breaking twice and other teams not showing up/not following the strategies, circumstances were beyond our control.
that said, we came up with a list of four expectations-->goals we had for svr.
1. HAVE FUN.
2. score more effectively and consistently
3. get chosen for an alliance.
4. get recognition for our efforts.
excepting 3, i'd say we did pretty well. i definitely had a good time. that first match today?! it was AMAZING. score 54-30 and we both hurdled and placed. we should all be really proud.
and WE DID get recognition - the judge's award! no, it's not a national award. but the judges saw us and recognized us as a good team. so YAYYY
the core team needs to sit down and have an intense debrief about the season - what we've done, and what we want to do, and how to get those things done.
thank you to everyone who came and supported us (including all the alum :]), and to emily for being awesome as always with our spiffy cards to use when pitching ourselves.
party tomorrow, 4-7:30 at erin's house. be there. (with food).
:)
wheeeeeeeee
WE WON THE JUDGES AWARD! that's really exciting
and we also got the safety token count award thing. yay for allie's safety captaining.
in more detail, friday afternoon we had a team meeting and discussed how we were doing. no, we weren't ranked high. with our gripper breaking twice and other teams not showing up/not following the strategies, circumstances were beyond our control.
that said, we came up with a list of four expectations-->goals we had for svr.
1. HAVE FUN.
2. score more effectively and consistently
3. get chosen for an alliance.
4. get recognition for our efforts.
excepting 3, i'd say we did pretty well. i definitely had a good time. that first match today?! it was AMAZING. score 54-30 and we both hurdled and placed. we should all be really proud.
and WE DID get recognition - the judge's award! no, it's not a national award. but the judges saw us and recognized us as a good team. so YAYYY
the core team needs to sit down and have an intense debrief about the season - what we've done, and what we want to do, and how to get those things done.
thank you to everyone who came and supported us (including all the alum :]), and to emily for being awesome as always with our spiffy cards to use when pitching ourselves.
party tomorrow, 4-7:30 at erin's house. be there. (with food).
:)
wheeeeeeeee
Thursday, March 13, 2008
SVR DAY #1
hello all!
thursday at svr - practice matches have gone well.
in terms of true changes made:
-we swapped out the lead screw successfully, the arm moves up and down beautifully
-we added arm-raising to autonomous code (after we stop moving)
-new, non-sketchy flag holder
-foamy bits have replaced noodly bits in terms of padding gripper
-JOYSTICKS! oh my god. the aux2 button is just badly built or something, because it has died on two seperate joysticks. but erin's bringing more tomorrow. this is ridiculous.
we have 10 qualification matches over the course of the next two days! i am pumped.
i definitely meant to write down the match schedule but i forgot...
match numbers that i remember which are possibly wrong:
3, 33, 17, 61...
wheeee! i'm excited. :)
i would try to post the match schedule tomorrow, but there isn't internet access at sjsu. :/
oh, and a HUGE thank you to emily and jimmy for playing hooky from work.
and the code documentation booklets are beyooootiful. they make me really happy.
also, thank you to both ms appelget and mourad for coming too.
:)
thursday at svr - practice matches have gone well.
in terms of true changes made:
-we swapped out the lead screw successfully, the arm moves up and down beautifully
-we added arm-raising to autonomous code (after we stop moving)
-new, non-sketchy flag holder
-foamy bits have replaced noodly bits in terms of padding gripper
-JOYSTICKS! oh my god. the aux2 button is just badly built or something, because it has died on two seperate joysticks. but erin's bringing more tomorrow. this is ridiculous.
we have 10 qualification matches over the course of the next two days! i am pumped.
i definitely meant to write down the match schedule but i forgot...
match numbers that i remember which are possibly wrong:
3, 33, 17, 61...
wheeee! i'm excited. :)
i would try to post the match schedule tomorrow, but there isn't internet access at sjsu. :/
oh, and a HUGE thank you to emily and jimmy for playing hooky from work.
and the code documentation booklets are beyooootiful. they make me really happy.
also, thank you to both ms appelget and mourad for coming too.
:)
Monday, March 10, 2008
Hosting Events
You gals rock. Wow, that's serious blogging and stuff happening in the last few days.
Just a reminder about the two seperate opportunities to host groups who are interested in gatorbotics! You are all invited to come help out (especially when the team from Mexico City is visiting). It's your chance to demonstrate your goodwill and to share your passion for robotics!!! Whoohoo!!
Wednesday, March 12
Tour / Talk with Team 2283 from Mexico City
3:30 - 4:30 pm at Science Project Room
Bob Smith, director of the Stanford Center for Innovations in Learning and IDEO alumnus is bringing a visiting rookie team from Mexico City here for the Silicon Valley Regional. They are visiting Karlin's lab, IDEO (I'm hosting, duh) and are hoping to visit Castilleja as well. If any of you want to hear me give an IDEO tour afterwards, you're welcome to join. Way to generate some inter-team spirit here!
Friday, March 21
Observation for IDEO 101 Team Design Challenge
1:00 - 2:00 pm at Science Project Room
A small team of new IDEO-ers and maybe one of IDEO's educational clients would like to visit Castilleja Robotics as part of their two day design challenge to figure out new ways to create exciting challenges for students by exploring non-traditional immersive forms of teaching and outside the book learning. You gals are definitely doing this through robotics. IDEO will donate $100 to Castilleja Robotics for your efforts to share your story!
It was great to see everyone on Wednesday night!
Em

Just a reminder about the two seperate opportunities to host groups who are interested in gatorbotics! You are all invited to come help out (especially when the team from Mexico City is visiting). It's your chance to demonstrate your goodwill and to share your passion for robotics!!! Whoohoo!!
Wednesday, March 12
Tour / Talk with Team 2283 from Mexico City
3:30 - 4:30 pm at Science Project Room
Bob Smith, director of the Stanford Center for Innovations in Learning and IDEO alumnus is bringing a visiting rookie team from Mexico City here for the Silicon Valley Regional. They are visiting Karlin's lab, IDEO (I'm hosting, duh) and are hoping to visit Castilleja as well. If any of you want to hear me give an IDEO tour afterwards, you're welcome to join. Way to generate some inter-team spirit here!
Friday, March 21
Observation for IDEO 101 Team Design Challenge
1:00 - 2:00 pm at Science Project Room
A small team of new IDEO-ers and maybe one of IDEO's educational clients would like to visit Castilleja Robotics as part of their two day design challenge to figure out new ways to create exciting challenges for students by exploring non-traditional immersive forms of teaching and outside the book learning. You gals are definitely doing this through robotics. IDEO will donate $100 to Castilleja Robotics for your efforts to share your story!
It was great to see everyone on Wednesday night!
Em
Friday, March 07, 2008
SUCCESS!
THE SECOND TIMER COUNTS SECONDS NOW!
this means that we actually need to change the autonomous code - currently it will count 19 seconds... that's way too long. poor benjitong will die otherwise.
YAYYYYYY
i'm really happy about this.
it turns out that 1000/25 is NOT 19. it's actually 40.
this means that we actually need to change the autonomous code - currently it will count 19 seconds... that's way too long. poor benjitong will die otherwise.
YAYYYYYY
i'm really happy about this.
it turns out that 1000/25 is NOT 19. it's actually 40.
svr prep stuff
yes, i'm blogging yet again
chairmans! we need to
-decide which 3 people are presenting
-prepare whatever we want to take to present
-get letter of reference from barriger, seton
-poster from last year?
-all those counterpoint/around the circle/published articles
has someone contacted local press about svr? i remember hannah saying she did this last year
who is going to uncrate? from what jrock told me, last year julia and kersten and beth martinson as the adult mentor person went down earlier and then the rest of us took a van from school.
within school publicity! announcements at meetings - flyers - bulletin - etc.
also, outside of school. tell people to come.
we've basically repacked. i also edited the packing list.
there are copies of the list in every crate.
actually, the more i think about, the more i do wish we had a wiki type thing. then we could just post everything to that. definitely something to think about for next year.
what about the bumpers? i know they got a little beat, but in general they're fine, yeah? or do we need to do some stapling before svr?
the weights are coming straight to svr? we didn't pack them, since they're at ideo...
code documentations nearly done... which nice person want to bind it for bathroom reading? :)
chairmans! we need to
-decide which 3 people are presenting
-prepare whatever we want to take to present
-get letter of reference from barriger, seton
-poster from last year?
-all those counterpoint/around the circle/published articles
has someone contacted local press about svr? i remember hannah saying she did this last year
who is going to uncrate? from what jrock told me, last year julia and kersten and beth martinson as the adult mentor person went down earlier and then the rest of us took a van from school.
within school publicity! announcements at meetings - flyers - bulletin - etc.
also, outside of school. tell people to come.
we've basically repacked. i also edited the packing list.
there are copies of the list in every crate.
actually, the more i think about, the more i do wish we had a wiki type thing. then we could just post everything to that. definitely something to think about for next year.
what about the bumpers? i know they got a little beat, but in general they're fine, yeah? or do we need to do some stapling before svr?
the weights are coming straight to svr? we didn't pack them, since they're at ideo...
code documentations nearly done... which nice person want to bind it for bathroom reading? :)
Thursday, March 06, 2008
worst moments
-dealing with the logistic/emails from FIRST and which to read/delete
-personal responsibility/team unity
-new team members
-not doing enough building
-not being able to come very often
-i wanted to do more
-communication needs to improve b.w subteams, leads, everyone
-:( when jim & em didn't communicate w/ us on the gripper design and plan
-missing fleetstreet
-gaps in communication
-involving recruits
-feelign like i couldn't do enough for the team
-ks ddint' come in and help us until like week 5
-a lot of time was spent sitting vs working on something productive
-lack of communication among leads, b.w leads and recruits, w parents, w mentors, w subteams...
-unwillingness of many people to work w recruits
-unwillingness of recruits to motivate themselves to watch and learn
-parent leads pulling their own weight - getting out emails/meal schedules etc
-overactivism (parents, etc)
-when the gripper motor nearly DIED
-i wish i could have doen a bit more as a new team member
-organization of material and supplies could have been better. this can save time on future work
-imbalance of the team memebrs
-new team members would leave after we tried to encorportate them into the building process
-team dynamics
-what to do with new team members?
-COMMUNICATION
-using the term "recruits" all the way through season
-gripper tension (hahah)
-when new people felt unneeded/couldn't stay all night before ship
-when ks came in and people were' communcation and were really stressed and unhappy
-when our alliance almost placed/hurdled 2 but didn't and we lost for the first time
-walking into the project room and having it be ice cold. even though the heat was runnign all day
-when the code wouldn't work
-when we didn't have a gripper five days before ship
-when we lost the cart handle and the drill (but we found the drill)
-when people dind't communicate with each other and made decisions without conferring with others
-we didn't start on the gripper until two days before ship....
-miscommunication/not enough communication between build leads and programming leads. not understanding the other side's pov
-going to home depot and finding that they were sold out of pvc pipe in teh size i needed
-when all ya came to ideo on feb18 and i didn't know what to do
-when there was miscommunication amongst the mentors about gripper. (feb14)
-if team member don't feel comfortable voicing/sharing concerns
-feeling useless/burden
-not knowing waht to do/tell others to do.
all that said, there's clearly room for improving. even so, i think it's important to remember that this season was not all bad - we definitely had fun :) and through this discussion, we will do our best to ensure that we don't have the same issues next year.
thank you everyone for your honest feedback.
-personal responsibility/team unity
-new team members
-not doing enough building
-not being able to come very often
-i wanted to do more
-communication needs to improve b.w subteams, leads, everyone
-:( when jim & em didn't communicate w/ us on the gripper design and plan
-missing fleetstreet
-gaps in communication
-involving recruits
-feelign like i couldn't do enough for the team
-ks ddint' come in and help us until like week 5
-a lot of time was spent sitting vs working on something productive
-lack of communication among leads, b.w leads and recruits, w parents, w mentors, w subteams...
-unwillingness of many people to work w recruits
-unwillingness of recruits to motivate themselves to watch and learn
-parent leads pulling their own weight - getting out emails/meal schedules etc
-overactivism (parents, etc)
-when the gripper motor nearly DIED
-i wish i could have doen a bit more as a new team member
-organization of material and supplies could have been better. this can save time on future work
-imbalance of the team memebrs
-new team members would leave after we tried to encorportate them into the building process
-team dynamics
-what to do with new team members?
-COMMUNICATION
-using the term "recruits" all the way through season
-gripper tension (hahah)
-when new people felt unneeded/couldn't stay all night before ship
-when ks came in and people were' communcation and were really stressed and unhappy
-when our alliance almost placed/hurdled 2 but didn't and we lost for the first time
-walking into the project room and having it be ice cold. even though the heat was runnign all day
-when the code wouldn't work
-when we didn't have a gripper five days before ship
-when we lost the cart handle and the drill (but we found the drill)
-when people dind't communicate with each other and made decisions without conferring with others
-we didn't start on the gripper until two days before ship....
-miscommunication/not enough communication between build leads and programming leads. not understanding the other side's pov
-going to home depot and finding that they were sold out of pvc pipe in teh size i needed
-when all ya came to ideo on feb18 and i didn't know what to do
-when there was miscommunication amongst the mentors about gripper. (feb14)
-if team member don't feel comfortable voicing/sharing concerns
-feeling useless/burden
-not knowing waht to do/tell others to do.
all that said, there's clearly room for improving. even so, i think it's important to remember that this season was not all bad - we definitely had fun :) and through this discussion, we will do our best to ensure that we don't have the same issues next year.
thank you everyone for your honest feedback.
best moments
-working w/ the team
-taking apart scotty
-everyone worked well together/listened to each other
-making to team more cohesive
-better school relations
-when i saw you gals prototyping amazing protos ie anndini's actuated arm
-a lot of ideas/enthusiasm in the beginning
-seeing our ideas come to life/using mecanum wheels
-better communication b/w build and prog. but still needs work
-actually taking scotty's questionable drive train and improving SO much. mecanum wheels.
-i like building circuits and cutting wires etc
-scouting results/outcome
-seton
-i learned a bunch of stuff
-you guys were awesome and you built a sweet bot
-the portland trip! i feel liek the team bonded well
-working together and it WORKING! :)
-awesome driving
-the separation of work b/w ideo and casti seemd ok if not good
-watchign all the designs evolve and come alive!
-the 1st year recruits wriing up the electronics board
-the mentors were very helpful and going to ideo was fun
-soldering
-i liked working with the team membbers
-team work
-math wins again!
-i got to see welding
-learnign new thigns about building/wiring/using power tools
-when i was able to work on helping the bot
-soldering the flower for jrock
-making the gripper move and hurdle at 4am
-sorbathane!
-cleaning the project room with music
-soldering
-seeing the robot in action
-choosing our alliance/having only girl team lead
-that one saturday at ideo - debuggin&breakingflowerpot&generalfun&STRAFING
-when we broke the flowerpot
-when erin pretended the claw was biting caroline and allie
-TOOOOOOOOOOONNNNNNNNNNNG
-soldering new wires on the burnt gts and actually having it work again!
-successful timers 8am the day of ship
-burning th einsulation off the smoking gts (AND DOUG FIXING IT!)
-1am on ship. staying up late to fix benjitong
-when the robot worked on shipday
-lebanese food and modernplace gelato!
-sweatshops
-seeing the gripper materialize
-emily riding benjitong down the ideo hallway
-prototyping
-learing
-walks to ideo
-seeing ppl drive the chassis
-taking apart scotty
-everyone worked well together/listened to each other
-making to team more cohesive
-better school relations
-when i saw you gals prototyping amazing protos ie anndini's actuated arm
-a lot of ideas/enthusiasm in the beginning
-seeing our ideas come to life/using mecanum wheels
-better communication b/w build and prog. but still needs work
-actually taking scotty's questionable drive train and improving SO much. mecanum wheels.
-i like building circuits and cutting wires etc
-scouting results/outcome
-seton
-i learned a bunch of stuff
-you guys were awesome and you built a sweet bot
-the portland trip! i feel liek the team bonded well
-working together and it WORKING! :)
-awesome driving
-the separation of work b/w ideo and casti seemd ok if not good
-watchign all the designs evolve and come alive!
-the 1st year recruits wriing up the electronics board
-the mentors were very helpful and going to ideo was fun
-soldering
-i liked working with the team membbers
-team work
-math wins again!
-i got to see welding
-learnign new thigns about building/wiring/using power tools
-when i was able to work on helping the bot
-soldering the flower for jrock
-making the gripper move and hurdle at 4am
-sorbathane!
-cleaning the project room with music
-soldering
-seeing the robot in action
-choosing our alliance/having only girl team lead
-that one saturday at ideo - debuggin&breakingflowerpot&generalfun&STRAFING
-when we broke the flowerpot
-when erin pretended the claw was biting caroline and allie
-TOOOOOOOOOOONNNNNNNNNNNG
-soldering new wires on the burnt gts and actually having it work again!
-successful timers 8am the day of ship
-burning th einsulation off the smoking gts (AND DOUG FIXING IT!)
-1am on ship. staying up late to fix benjitong
-when the robot worked on shipday
-lebanese food and modernplace gelato!
-sweatshops
-seeing the gripper materialize
-emily riding benjitong down the ideo hallway
-prototyping
-learing
-walks to ideo
-seeing ppl drive the chassis
general things to discuss/put out there
past
-what are we changing for svr/general
-school relations/$$
-what people expected from the season and what they actually got
-personally taking initiative
-how do the parents/teachers feel about robotics?
-compensation for mentors
fuzzy/present
-animation - new members
-emotional breadth stability and support
-potential hiring of a full time mentor?
-what is the meanign of learning?
-what is the meaning of leadership?
-kpcb mentor $$
-parents: information packed to be signed by by parents to ensure understanding of the team/communication protocol
-more team dinners/social/ice cream eating/story knowing
-intra team relations (pizza party? event on saturday of svr?)
-force separat b/w outside problems and robotics problems
-do we want an entirely student - BUILT robot or a studentdesigned robot? where are we willing to compromise?
-blogs - useful? who reads this, anyway?
-expectations vs. results
-LEAD VS. LEARN VS. DO VS. TEACH
-communcation (Team dynamics)
-new team member tasks
FUTURE!
-what about the offseason?
-improvements for next years
-independent study - who's intereste?
-how can parents support the team better? eg, software installation
-nontech suff - $$ & ppl for next year (better communication with mentors and tech)
-personally taking initiative
-recruiting earlier - right after tech challenge? what to do with new ppl?
-summer camp! :)
-tech shop classes
-continuity throughout the year
-encouraging nontech to join us over the summer/do nontech stuff over thes umemr
-stuff to do over the year (pre/post season)
one thing people want for the future:
-i want to hire someone to help organize this amazing team
-advertising nt website, picture animation ---> classes
-parent liason
-fundraise earlier, target more sponsors, train nontech lead
-newsletter (parents, school)
-i'd like the team to hire someone to help organize and provide continuity for the team
-ginna = list maker!
-use yahoo calendar to coordinate paretns and food (could also use it for build scheduling)
-keeping recruits involved in final design (ex gripper this year)
-making a list that 1st yr students can do (pics, etc)
-leadership retreat!
-use interested people in the offseason to find sponsors
-a robtoics music playlist
-have monthly meeting with the entire team - short to communicate b.w tech and nontech
-what are we changing for svr/general
-school relations/$$
-what people expected from the season and what they actually got
-personally taking initiative
-how do the parents/teachers feel about robotics?
-compensation for mentors
fuzzy/present
-animation - new members
-emotional breadth stability and support
-potential hiring of a full time mentor?
-what is the meanign of learning?
-what is the meaning of leadership?
-kpcb mentor $$
-parents: information packed to be signed by by parents to ensure understanding of the team/communication protocol
-more team dinners/social/ice cream eating/story knowing
-intra team relations (pizza party? event on saturday of svr?)
-force separat b/w outside problems and robotics problems
-do we want an entirely student - BUILT robot or a studentdesigned robot? where are we willing to compromise?
-blogs - useful? who reads this, anyway?
-expectations vs. results
-LEAD VS. LEARN VS. DO VS. TEACH
-communcation (Team dynamics)
-new team member tasks
FUTURE!
-what about the offseason?
-improvements for next years
-independent study - who's intereste?
-how can parents support the team better? eg, software installation
-nontech suff - $$ & ppl for next year (better communication with mentors and tech)
-personally taking initiative
-recruiting earlier - right after tech challenge? what to do with new ppl?
-summer camp! :)
-tech shop classes
-continuity throughout the year
-encouraging nontech to join us over the summer/do nontech stuff over thes umemr
-stuff to do over the year (pre/post season)
one thing people want for the future:
-i want to hire someone to help organize this amazing team
-advertising nt website, picture animation ---> classes
-parent liason
-fundraise earlier, target more sponsors, train nontech lead
-newsletter (parents, school)
-i'd like the team to hire someone to help organize and provide continuity for the team
-ginna = list maker!
-use yahoo calendar to coordinate paretns and food (could also use it for build scheduling)
-keeping recruits involved in final design (ex gripper this year)
-making a list that 1st yr students can do (pics, etc)
-leadership retreat!
-use interested people in the offseason to find sponsors
-a robtoics music playlist
-have monthly meeting with the entire team - short to communicate b.w tech and nontech
what new team members did this year
-prototyping
-screw mecanum wheels (Twice...)
-prototype for arm
-velcroed protective polycarb on board/chassis
-soldering
-organing the project room/familiarizing with parts
-soldering
-taking apart scotty
-wiring electronics board
-drilling holes into the chassis for bumpers
-painting/repainting the bumpers
-going on random errands
-watching jim cut/weld things
-soldering limit switch
-taking apart scotty
-writing electronics board
-observing
-discussion/making group design decisions
-cleaning project room
there are some obvious trends here.
ginna has volunteered to be in charge of next year's new team members! yay! that's awesome.
we also talked about other things new team members can do and the importance of being willing to simply watch and observe - that's how you learn!
-screw mecanum wheels (Twice...)
-prototype for arm
-velcroed protective polycarb on board/chassis
-soldering
-organing the project room/familiarizing with parts
-soldering
-taking apart scotty
-wiring electronics board
-drilling holes into the chassis for bumpers
-painting/repainting the bumpers
-going on random errands
-watching jim cut/weld things
-soldering limit switch
-taking apart scotty
-writing electronics board
-observing
-discussion/making group design decisions
-cleaning project room
there are some obvious trends here.
ginna has volunteered to be in charge of next year's new team members! yay! that's awesome.
we also talked about other things new team members can do and the importance of being willing to simply watch and observe - that's how you learn!
between rounds checklist 06
most of these aren't actually relevant, but i do want to make a more complete list...
Things to do between rounds:
-Check electronics board:
-make sure speed controllers are on tight
-make sure board is firmly attached to aluminum plate which should be firmly attached to transmissions
-Make sure PWMs (LED, pinwheel esp) are plugged in
-replace chain tensioners
-check bumpers:
-need patches?
-still on the robot?-
Check turret set screws
-tighten shaft collars on chassis wheel axles
-tighten shaft collars on wheel o' doom axles-check chassis wheel axles (still straight?)
-replace batteries:
-check voltages
-zip tie 12V
-check wires on turret (not tangled, in chains)
-check PWM jumper for autonomous
Things to do between rounds:
-Check electronics board:
-make sure speed controllers are on tight
-make sure board is firmly attached to aluminum plate which should be firmly attached to transmissions
-Make sure PWMs (LED, pinwheel esp) are plugged in
-replace chain tensioners
-check bumpers:
-need patches?
-still on the robot?-
Check turret set screws
-tighten shaft collars on chassis wheel axles
-tighten shaft collars on wheel o' doom axles-check chassis wheel axles (still straight?)
-replace batteries:
-check voltages
-zip tie 12V
-check wires on turret (not tangled, in chains)
-check PWM jumper for autonomous
one last thing:
code documentation is getting there (we have A LOT of code this year, actually. not in terms of complexity, but length. i think i'm at 63 pages? those case statements take up a lot of room.)
who wants to bind it for us?
how many copies should we make? one for karlin, one for emily, at least 2 for us, ? for judges...
chairman's presentation - is everyone familiar with "our story"? what is "our story"?
box of prototypes
any changes we want to make to the spiffy poster
outreeeeeach pictures
etc
code documentation is getting there (we have A LOT of code this year, actually. not in terms of complexity, but length. i think i'm at 63 pages? those case statements take up a lot of room.)
who wants to bind it for us?
how many copies should we make? one for karlin, one for emily, at least 2 for us, ? for judges...
chairman's presentation - is everyone familiar with "our story"? what is "our story"?
box of prototypes
any changes we want to make to the spiffy poster
outreeeeeach pictures
etc
Wednesday, March 05, 2008
from anne's comment
just in case people didn't get to anne's comment.
after only a day, some of this is obsolete, but that's okay :)
we're also potentially changing the gear ratio for the arm from 4:1 to 6:1 (did i say that right? oh well)
and we're having an all-team meeting on wednesday march 5 from 6:30-7:30 (i thought it was 5:00 but erin just sent out an email)...anyway, dinner will be provided :)
I CAN'T BELIEVE WE FOUND THE DRILL! GRR!!!
also, nandini and erin brought the weights to IDEO today so they could lose some weight (in case we make a separate tower thing for the flag) i'm not sure when we're getting them back though
i think we should repack for SVR (or not exactly repack, but reorganize whatever is in those crates and potentially bring more stuff b/c we have no weight limit...right?) i'm happy to do that but i'll have to do it this week b/c i have no time next week :(
WE NEED MORE DUCT TAPE! i can probably make an ace run for more stuff of the sort sometime this week //they went and bought this stuff today (yay for telling ace people that you're jon (J-O-N) rockman!)
after only a day, some of this is obsolete, but that's okay :)
we're also potentially changing the gear ratio for the arm from 4:1 to 6:1 (did i say that right? oh well)
and we're having an all-team meeting on wednesday march 5 from 6:30-7:30 (i thought it was 5:00 but erin just sent out an email)...anyway, dinner will be provided :)
I CAN'T BELIEVE WE FOUND THE DRILL! GRR!!!
also, nandini and erin brought the weights to IDEO today so they could lose some weight (in case we make a separate tower thing for the flag) i'm not sure when we're getting them back though
i think we should repack for SVR (or not exactly repack, but reorganize whatever is in those crates and potentially bring more stuff b/c we have no weight limit...right?) i'm happy to do that but i'll have to do it this week b/c i have no time next week :(
WE NEED MORE DUCT TAPE! i can probably make an ace run for more stuff of the sort sometime this week //they went and bought this stuff today (yay for telling ace people that you're jon (J-O-N) rockman!)
debrief
more coming on this soon - we had an all-team debrief today. we got a lot of really good feedback about what worked well this season, what didn't... what people want from the future, etc. it's all documented on postit notes so i'll try to type those up to archive. the feedback is actually extremely useful. it's great to know what people enjoyed doing and what people didn't. that being said, communication should not stop. we're always open to respectful suggestions and comments.
thank you to everyone who attended, and if you didn't i'll hopefully archive all those color coded postit notes soon! that way we'll actually be able to followthrough and change things next year.
it was so fulfilling to hear that both picasa and the blog are being actually used rather than just spending the time and no one using the features.
see you all next weekend for SVR!!!! i'm really excited :)
please do come (practice matches thursday, qualification matches all day friday, until lunch saturday and elimination/playoff after lunch. awards ceremonies both fri and sat evenings.)
we'll be swapping out the lead screw on thursday and benji(tong) will be back and better than ever by friday!
thank you to everyone who attended, and if you didn't i'll hopefully archive all those color coded postit notes soon! that way we'll actually be able to followthrough and change things next year.
it was so fulfilling to hear that both picasa and the blog are being actually used rather than just spending the time and no one using the features.
see you all next weekend for SVR!!!! i'm really excited :)
please do come (practice matches thursday, qualification matches all day friday, until lunch saturday and elimination/playoff after lunch. awards ceremonies both fri and sat evenings.)
we'll be swapping out the lead screw on thursday and benji(tong) will be back and better than ever by friday!
Monday, March 03, 2008
portland! (+svr)
so we're back from portland!
we did really well, esp compared to last year. final ranking was 10th out of 55, and due to the top 8 teams choosing within themselves, we were the captains of the 7th seeded alliance! (we seem to have a thing for being seventh.) playing against 488xbot and 100woodsidecarlmont, we did lose in the quarterfinals.
judges were genuinely interested in our team. being the only allfemale team in portland, we had a corner pit and many many judges and their friends chatted away to us. :) this is a very good sign.
we we'll be back and better by svr! march 13, 14, 15. get pumped.
we're swapping out the lead screw for one with a higher pitch. that way, we'll actually use the arm since it will be faster.
i found the drill in the silent study room this morning... not quite sure how it got there.
time to start planning for svr and our chairman's presentation. thanks to emily for the huuuuuge ass poster.
i'm working on code documentation, so that will be doen by svr.
an ENORMOUS thank you to mr rockman, ms o'malley, emily, karlin and ms mourad for coming with us. :) [and that lebanese food was ammmmazing]
we did really well, esp compared to last year. final ranking was 10th out of 55, and due to the top 8 teams choosing within themselves, we were the captains of the 7th seeded alliance! (we seem to have a thing for being seventh.) playing against 488xbot and 100woodsidecarlmont, we did lose in the quarterfinals.
judges were genuinely interested in our team. being the only allfemale team in portland, we had a corner pit and many many judges and their friends chatted away to us. :) this is a very good sign.
we we'll be back and better by svr! march 13, 14, 15. get pumped.
we're swapping out the lead screw for one with a higher pitch. that way, we'll actually use the arm since it will be faster.
i found the drill in the silent study room this morning... not quite sure how it got there.
time to start planning for svr and our chairman's presentation. thanks to emily for the huuuuuge ass poster.
i'm working on code documentation, so that will be doen by svr.
an ENORMOUS thank you to mr rockman, ms o'malley, emily, karlin and ms mourad for coming with us. :) [and that lebanese food was ammmmazing]
Wednesday, February 20, 2008
ditto anne's post.
THANK YOU to anyone and everyone who made this possible.
we DID it, guys! :]
that said, we leave for portland wednesday and have plenty to do before then.
on top of anne's stuff we need
-a complete bill of materials
-stuff for chairmans //not until svr
-programming compilation
(wow, it's reflex to comment out stuff now. eek)
woodie flowers and chairman's are getting submitted tomorrow.
now go catch up on sleep and relax until school starts.
THANK YOU to anyone and everyone who made this possible.
we DID it, guys! :]
that said, we leave for portland wednesday and have plenty to do before then.
on top of anne's stuff we need
-a complete bill of materials
-stuff for chairmans //not until svr
-programming compilation
(wow, it's reflex to comment out stuff now. eek)
woodie flowers and chairman's are getting submitted tomorrow.
now go catch up on sleep and relax until school starts.
Tuesday, February 19, 2008
SHIP SHIP SHIP!!!
WE SHIPPED THE ROBOT!!! :D
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
A BIG THANK YOU to all our mentors
especially Emily, Jimmy, Doug, Karlin, Tiffany, Jessa, and Sophia (even though she's not really a mentor) for being there on the days before ship
(hopefully I didn't forget anyone in my sleep-deprived state)
(and thanks also to Schnurlee and Julia for showing up :D)
thanks to the programming team for staying up all night to fix code
thanks to Castilleja for letting us use the gym (even though those carpets were gross)
thanks to Mr. Rockman for being at school on the day of ship and doing paperwork and stuff
thanks to the freshmen for fixing the crate and purging the project room being useful
thanks to parents who stayed in the gym late at night
thanks to the build team just for being so awesome and cool (jk)
THANK YOU THANK YOU THANK YOU
(^.^)
i'm so happy that the robot is shipped
and without much of a hassle, really :D
it definitely was less stressful than last year
unfortunately, not everything is done yet (=.=)
STUFF TO DO: (please comment if i left stuff out):
1. chairman's, woodie flowers, etc (by thursday?)
2. packing for portland (contact Schnurlee or Julia for packing list)
3. Jimmy needs to make the things that go with the globe motors for the gripper (5x)
4. stuff to bring to portland to show judges (Nandini and I started a box today of our prototypes)
5. do we need another portland meeting or are we good to go?
6. autonomous? is it working okay?
7. Tiffany suggested we make sorbothane templates for the gripper (as in precut sorbothane, metal plates, extra rivets, a functioning riveter...)
okie dokie. I really hope I didn't leave anything out.
Friday, February 15, 2008
to dooooo in the next five days
in no particular order
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
-gripper/arm
-get the GTS functional (THOUGHT: the reason abbott and me couldn't get the code working? were we using the shitty gts?)
-kill switch. mount it. somewhere nice.
-e board cover?
-numbers on bumpers
-signage
-TV remote/IR board? mount?
-get carpets for gym
-talk to chapman about moving the crate for us
-CHAIRMAN'S/WOODIE FLOWERS
-put bumper holes in chassis
-make the sad speed controller happy
hang in there eat lots of post feb 14 candy and we'll pull through.
Wednesday, February 13, 2008
wednesday
hey
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
sorry i haven't reported back for a while
so coding's going fairly well. we've gotten a fair amount of testing time for the robot, which is obviously a good thing. we've tweaked the drive code, and, as of tuesday night, we strafe!
the robot does what we want it to do (now.) we drove in confined ideo space and it was fairly easy to control (though i was not the one driving).
i'm really loving the whole two-electronics-boards thing.
hybrid period work has begun. :) is someone donating a tv remote?
we kind of, uh, busted a GTS. emily suggested plugging the gts straight into the distribution block. whoooops. we're hoping it's salvagable.
not sure exactly what build's been doing. there's a spiffy little gripper prototype and jimmy finished his awesome mount thing today.
possibly robot names: benjy, timothy... definitely a boy robot.
bumpers have been painted bright green. do not attempt to spray paint them next year, you will only get a little giggly and dizzy and have ugly bumpers. instead, paint-paint them first. :)
the portland meeting was today, forms and check due friday.
IMPORTANT NOTE TO DRIVER: PRESS THE BUTTONS ON THE JOYSTICK HARD OR THEY WILL NOT WORK.
5 days to go, people! hang in there. we'll pull through. i'm excited.
thank you to all our amazing mentors. today, thanks to the ever-helping jimmy, emily, karlin and tiffany. you're all amazing. we thank you thank you thank you.
Tuesday, February 12, 2008
monday and tuesday
MONDAY
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
over the weekend we went to look for last years bumpers and we only found one!? yeah. and it was the 28" side, too. grr. wonder where the 2 long ones went? anyway, we salvaged the wood and t-nuts from bumpers from 2 years ago, but we bought new pool noodles b/c the ones from 2 years ago looked TERRIBLE. unfortunately, all the wood was 28" long (no 38" ones...where did they all go?!?) so we're just going to have some places on the robot w/ noodle and no wood. i'm sure it'll be ok. we asked emily and jimmy and both said it was fine, so it'll be all good :D
on monday, i'm not sure what programming did (they went to ideo) but build built 3 spanking new bumpers! YAY! we had fun with the staple gun (safety first!) and the canvas that wraps the bumpers smells really bad. but anyways...we almost made them wrong. NOTE FOR NEXT YEAR: T-NUTS GO ON INSIDE, NOT OUTSIDE!!! (aka the pool noodles go on the side with the t-nut sticking out of the wood)
allie also cut out "1700" out of foamcore today (for our stencil when we spray paint the bumpers!) but since she used an x-acto knife, it looks a bit...well...funky. ahahhaa. so tomorrow we're hoping to lasercam it at ideo! :D
TUESDAY
today caroline, nandini, and i went to ideo during lunch for jimmy's "first five minutes". ideo has these lunch meetings every tuesday and jimmy had to present something for his first five minutes so he wanted to show the robot :D. it went well but when nandini was driving it, we realized 2 things were wrong:
1. the robot wouldnt turn/go sideways (it was driving worse than on saturday)
2. the front left wheel (NOT the front right wheel) was turning a lot more than the other wheels (and it was off the ground kind of)
so ummm...yeah. :(
these 2 problems might be related (like the robot won't go sideways b/c one wheel isnt touching the ground) but in any case...it must be fixed! :( waaah.
on a happier note, allie lasercammed 1700 out of this really cool black plastic-y thing (acrylic?). it is SO COOL. so i suspect we will be spray painting our new beautiful bumpers soon.
also, nandini and tiffany were thinking of a gripper design. we were going to prototype it (lasercamming) but the computer in the lasercam room wouldnt import tiffany's DXF designs :( so we couldnt lasercam the gripper parts and we were very sad. emily is going to try to figure out whats going on...
AS OF RIGHT NOW WE ARE 76 POUNDS (w/o battery, w/ tower, electronics board, all 4 wheels, chassis, etc)
so that means we still have 44 pounds left...
(it sounds pretty good but i'm not sure how much the gripper and extra motors will weigh...)
and we got our teflon-coated jackscrew FINALLY today!!! :D
thanks to sallie's dad for bringing dinner today! (annie really really REALLY liked that pizza)
Saturday, February 09, 2008
saturday
today was just one of those robotics days
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
lots of driving, perfecting code, adding code...
anne and nandini would probably have an update on the state of towers/grippers/arms
annie and tobi wired up a spiffy (and organized!) electronics board. thank god, the other one was starting to get a little scary.
coding:
we added a brake. well, two, but one is ghetto to fit with our theme and SHOULD NOT be used.
do not press the trigger. it extremely reverses the direction of the motors. if lightly tapped, the point was that it would be an immediate brake.
the one you should actually use is the thumb button, which will set everything to 127.
we also fixed the turning issue
except then doug/karlin decided that since our motors were all strangely wired up we needed to fix that... so equation-writing and brainstorming ensued. i'm not sure if we came up with anything by the end of the day.
bumpers! kind of a neccessity, we've realized... hehehe. so i think people were getting wood cut, etc, for that. hopefully we can acquire some pool noodles asap. bumper party tomorrow?
oh... heheh we managed to SNAP the end off the oi radio. eek. they are apparently extremely flimsy. however, it still somehow works, so yknow, we'll just go with it. and at competitions, we plug into the master system, so it doesn't matter too too much.
is anyone planning a end-of-build party again?
we have succesfully made our mark on ideo. twice.
and fingerblasters are fuuuun. :) we're not sure how ideo people manage to get any work done.
by the way, the robot needs a ghetto name. seeing as it, uh, is extremely extremely ghetto. ideas in the works.
10 days and counting? or maybe it's nine?
eek.
we'll get there - if nothing else, we should be able to speedily drive around in circles.
thank you thank you to emily, doug, jimmy, karlin, eric, and tiffany
also to the mukherjees for awesome food
11 at castilleja tomorrow, probably at ideo by 1?
Friday, February 08, 2008
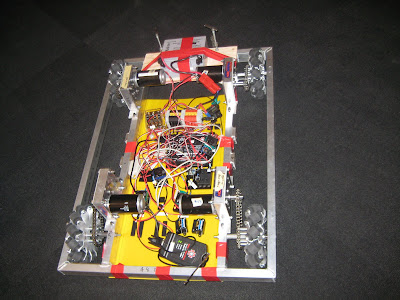
Wednesday, February 06, 2008
long time no blogging...
yay to anne for picking up my blogging slack!
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
it's been a while. yeah. sorry. hopefully i'm back for good now.
well, with 12 days to go, we're in pretty decentish shape!
we have a chassis with four wheels and four gear boxes (yay for easier chain tensioning!). it sort-of kind-of drives. as in, it drove on saturday with emily's funny button-pushing code.
the code in the debuggingblahblah folder does NOT really work when downloaded. the speed controllers do the blinking dance. BUT we are "in the loop." so maybe the pwms are getting overwritten by some default code crap?
BUT when we downloaded emily's code from saturday, three out of four wheel moved and speed controllers were steady state. we determined that there is one unhappy (and so labeled) speed controller, which prevented the last wheel from moving.
coding's... getting there. we have one file (drivingoffcases.c) that has a buuuunch of functions and our two large case statements. we still need to write the part that talks to the pwms and then the drive_routine function which will bring them all together. also, uh, remember to reference all that in user_routines.c. it doesn't miraculously do that by itself. we'll continue work on that.
oh, our basic plan: the joystick axes will be y for fwd/bwd and x for turning (although i don't know if we can actually turn - we may only be able to spin. hm). and then the aux buttons will let us SLIDE!
build: i think they're getting there on an actual real gripper/tower design? i don't really know details. i heard something about jimmy welding soon, though, so that's definite progress!
yay for doug for getting the bad tether fixed, and the autonomous box (i know ginna was working on that with him in the ee lab today) and working some serious magic on the gts resistors generally being cool like that.
thanks to karlin and jessa for programming awesomeness
and jimmy and emily for always awesomeness
and ginna's family for the awesome sandwiches
i need some awesome sleep...
Tuesday, February 05, 2008
4 gearboxes and we need a gripper... :(
YAY I'M BLOGGING!!!
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
well yesterday (monday) we went to ideo and i guess we decided to use 4 gearboxes on the chassis instead of 2 so we can be a crab now. so jimmy and the build team took apart the gearboxes for the 109874023809282th time (jk) and jimmy had to make the other gears in the 2 extra gearboxes skinnier and he had to make new mounts for the gearboxes. (poor jimmy) and i heard doug did something amazing/magical with this year's screwed up GTS (or something electronics-y)
and today jessa and karlin came today to help with programming :D
and build tried to make a prototype of the gripper that had 2 arm things that moved parallel to each other. also, the leadscrew should have arrived today (hopefully we can see it tomorrow when we go to ideo!)
so for tomorrow i think we (as in build) should start on the final arm thing and definitely continue prototyping grippers and stuff. and as for programming...well i don't really know.
thanks to the billimoria family for bringing really yummy food! :D
Subscribe to:
Comments (Atom)